

Nonlinear robust control method of posture of single-rotor unmanned helicopter based on fuzzy feedforward
A technology of unmanned helicopter and robust control, applied in the direction of attitude control, etc., can solve problems such as high algorithm complexity, unknown control accuracy and robustness, and strong model dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
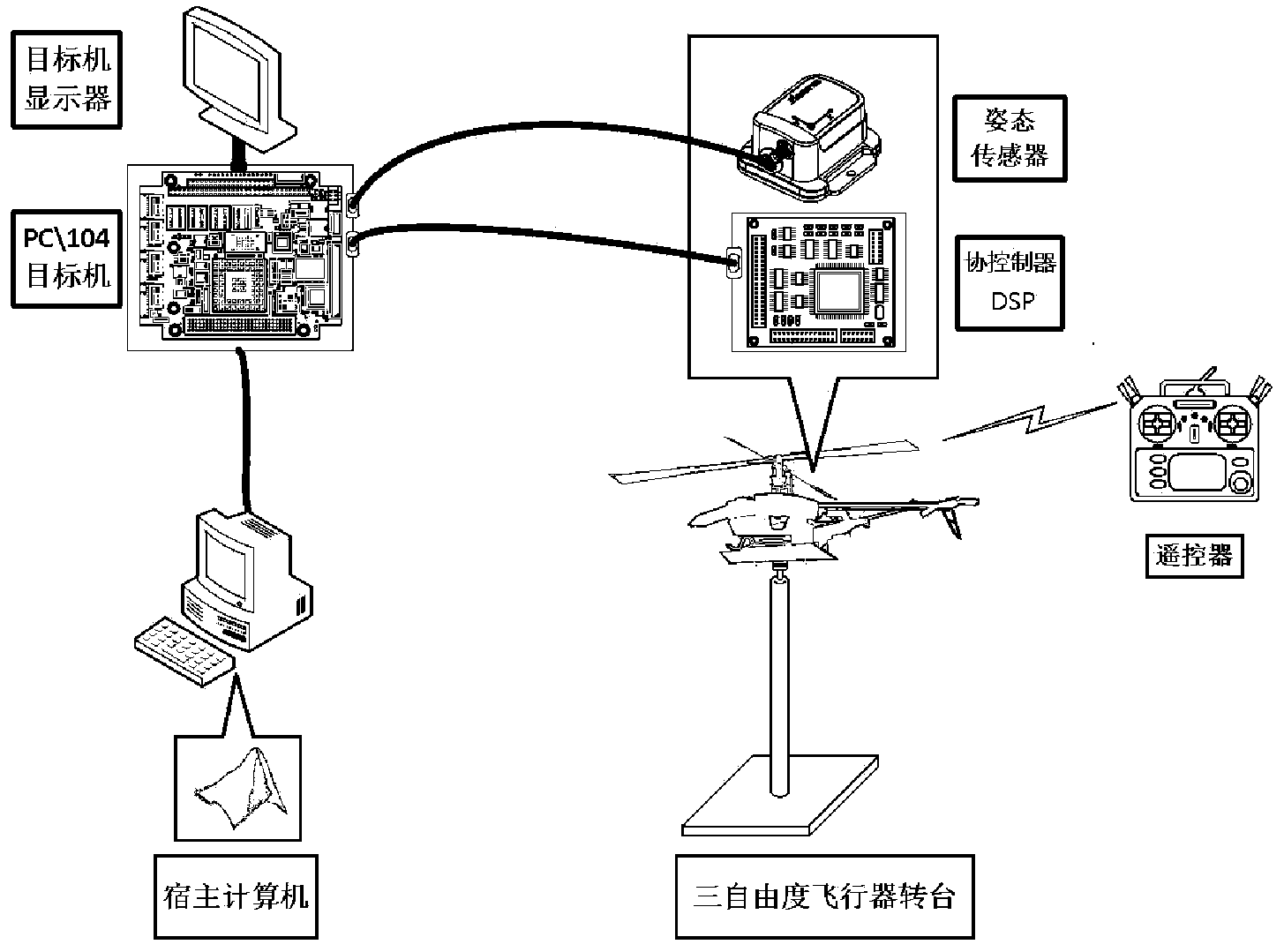
[0089] The invention belongs to the research field of autonomous flight control of micro-rotor unmanned aerial vehicles, and is mainly aimed at the control algorithm design of a single-rotor unmanned aerial vehicle, including the introduction of the attitude dynamics model of the unmanned helicopter, the non-linear semi-continuous robustness based on fuzzy feedforward Controller design and attitude flight control experiments.
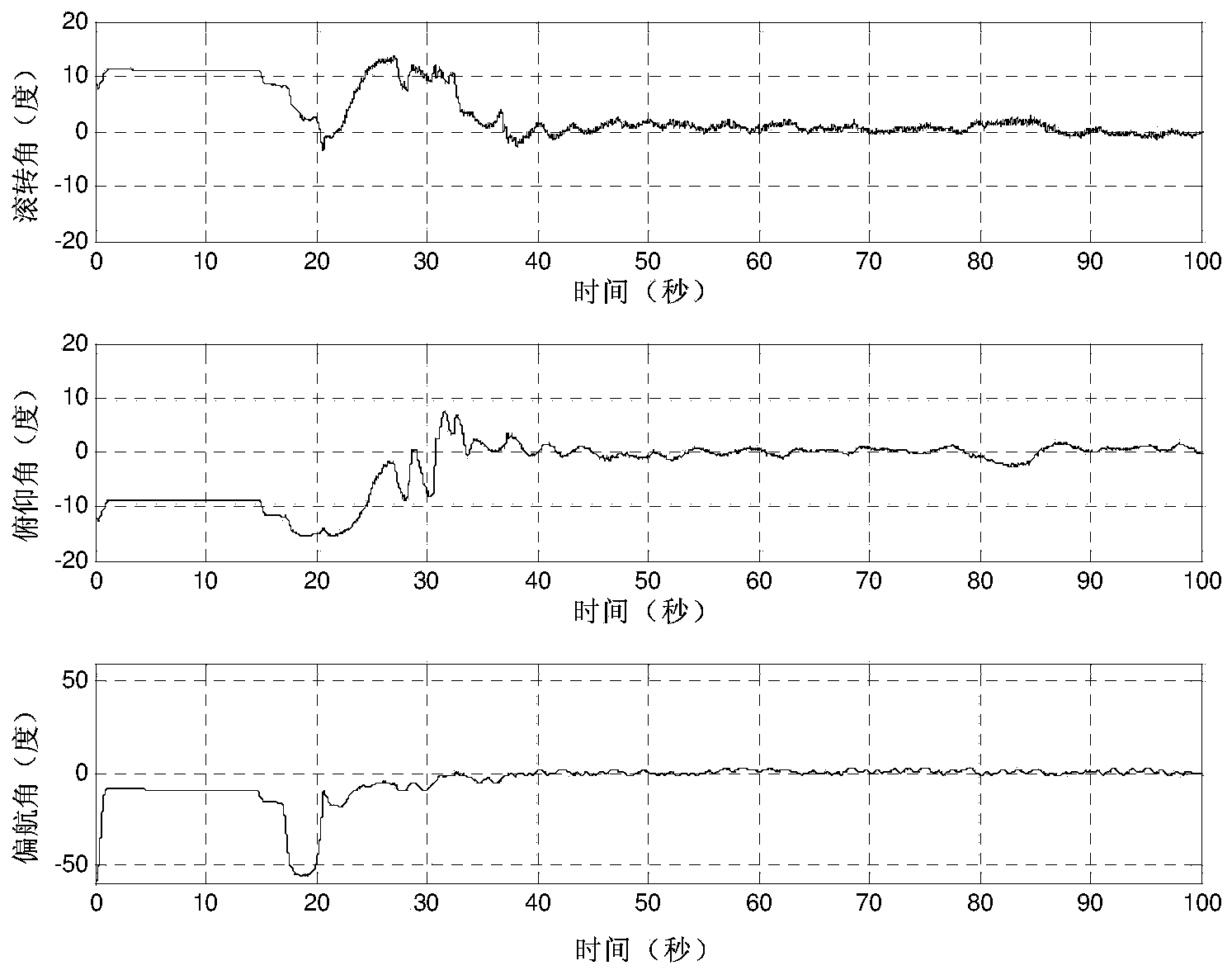
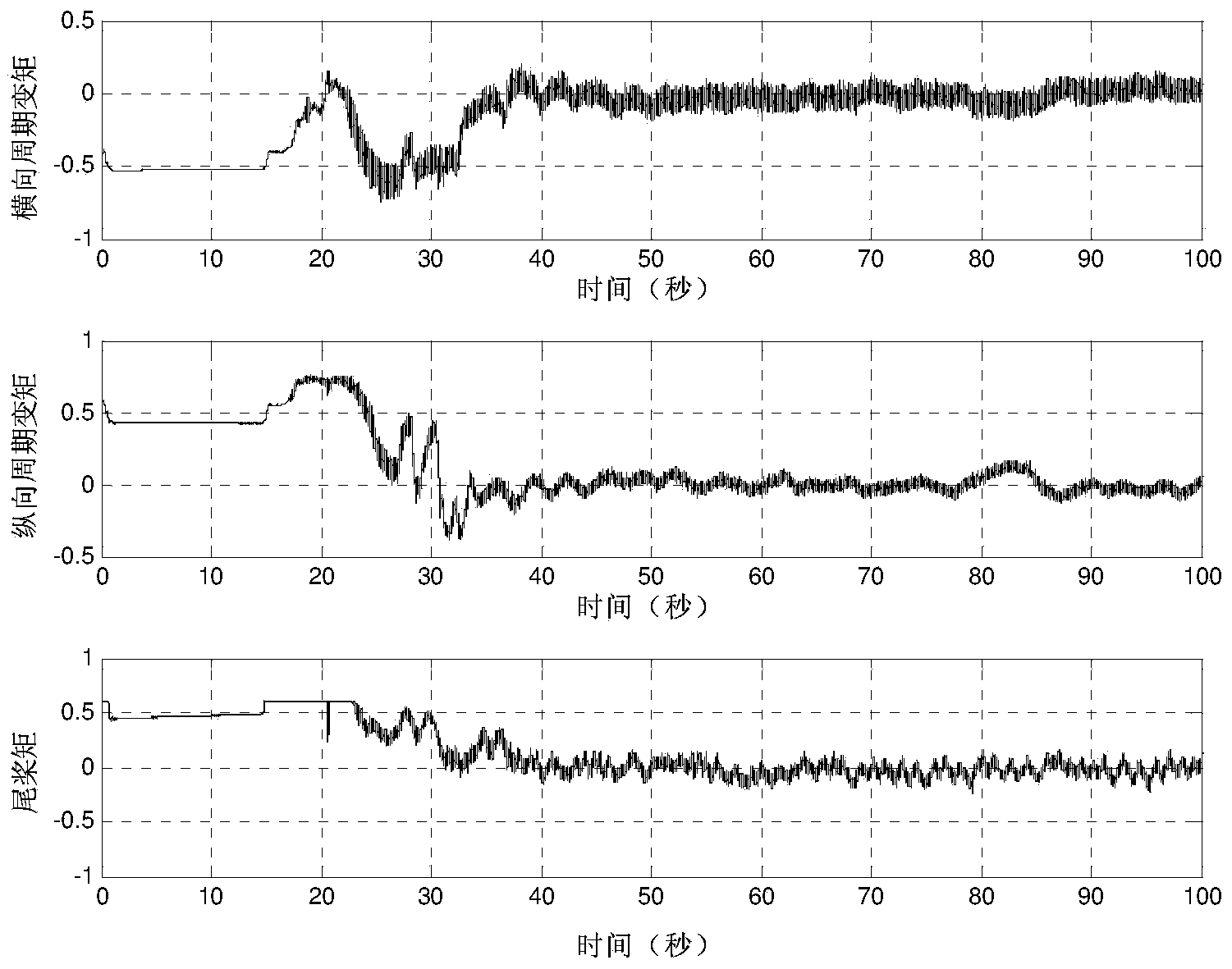
[0090] Aiming at the attitude control problem of single-rotor unmanned helicopters, the present invention designs a nonlinear semi-continuous robust control algorithm based on fuzzy feed-forward compensation, and performs a stability analysis based on the Lyapunov method, which proves that the designed controller can realize infinite Semi-global progressive tracking control of human-helicopter attitude. The flight test results of attitude control show that the invention can make the unmanned helicopter realize fast and accurate stabilization control, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More