

Combination navigation filtering method of multi-model underwater vehicle
A combined navigation filtering and underwater vehicle technology, which is applied in navigation, surveying and mapping and navigation, navigation computing tools, etc., can solve the problems of system mode switching lag, estimation accuracy reduction, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention is described in detail below in conjunction with accompanying drawing of description:
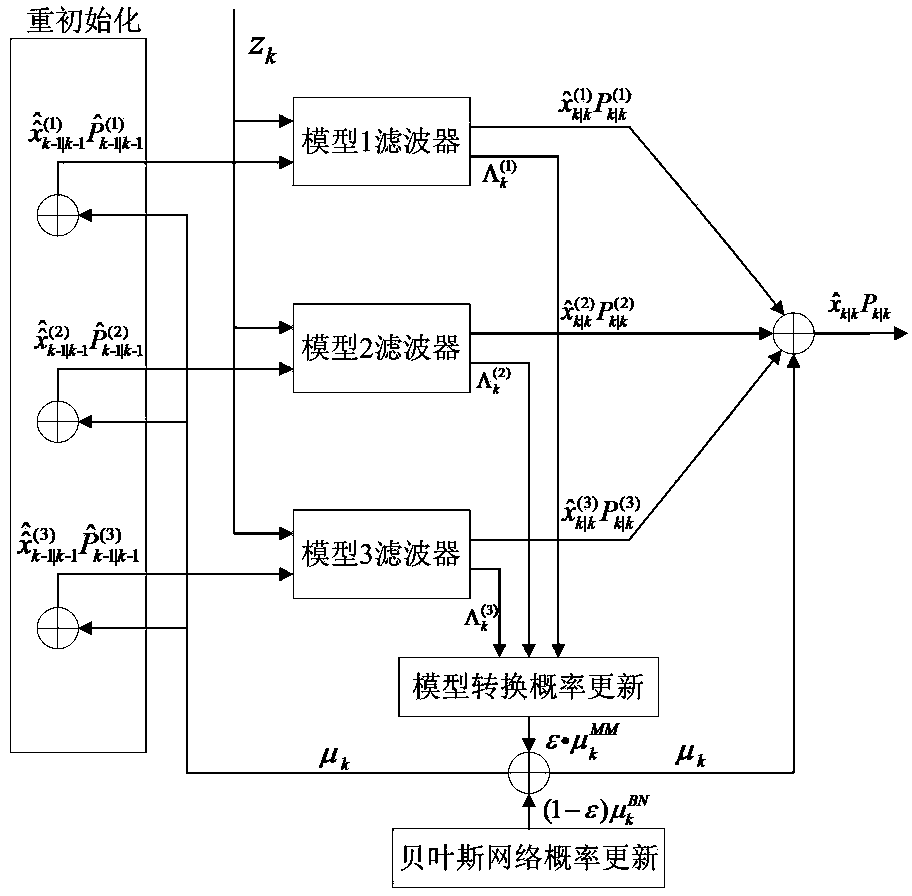
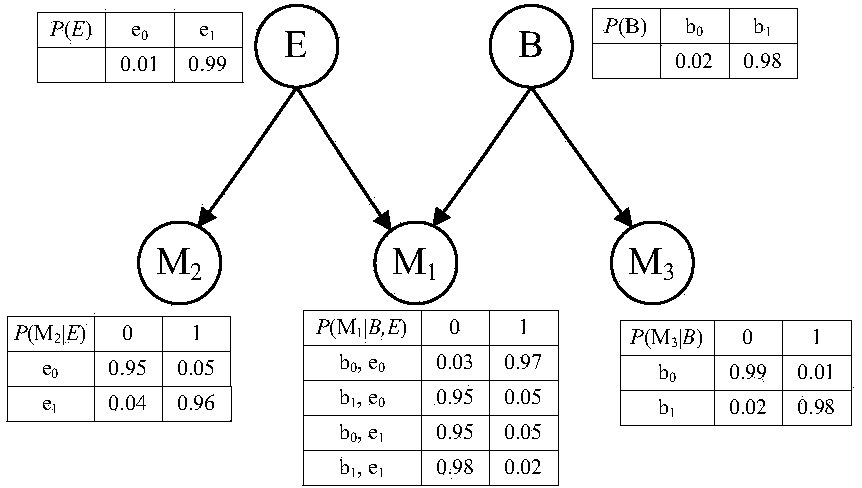
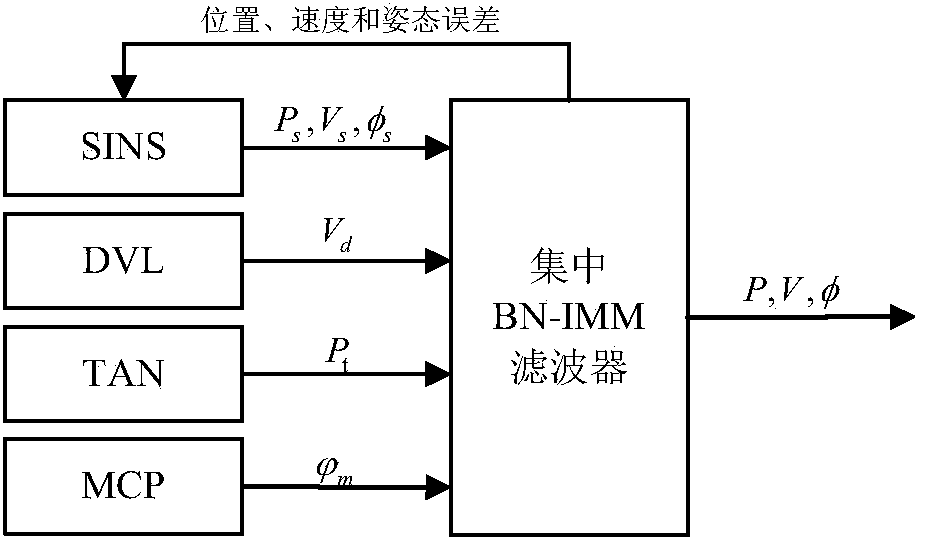
[0039] like image 3 As shown, firstly, the system state equation, observation equation and noise model are established according to the characteristics of the SINS / DVL / TAN / MCP integrated navigation system; figure 2The Bayesian network of the integrated navigation system shown in the figure is combined with the interactive multi-model filtering algorithm to obtain the following figure 1 The shown Bayesian network enhanced multi-model estimation algorithm structure, according to the above algorithm structure, uses Bayesian network parameters to modify the model switching probability in multi-model estimation, and uses weighted sum to calculate the estimated fusion of all filters. according to Figure 4 The trajectory simulation curve of the underwater vehicle is shown, and the navigation computer completes the data processing and settlement work of the integr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More