

An autonomous navigation method for star sensors suitable for high mobility vehicles
A star sensor and autonomous navigation technology, applied in the field of astronomical navigation, to avoid calculation timeout or attitude loss, improve attitude update rate, and improve attitude capture speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
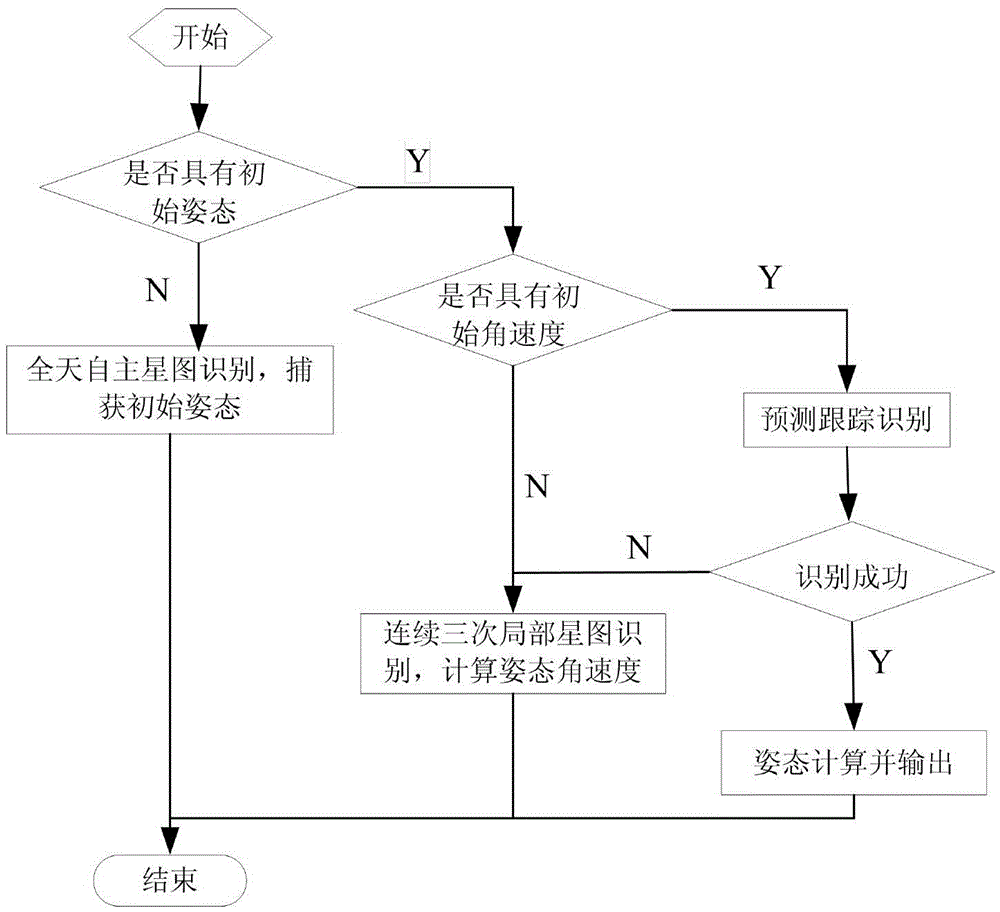
[0019] Specific implementation mode 1. Combination Figure 1 to Figure 3 Illustrate this embodiment, be applicable to the star sensor navigation method of high-mobility carrier, this method is realized by the following steps:
[0020] Step 1: Initial attitude capture; perform all-day autonomous star map recognition on the star map captured by the star sensor, calculate the initial orientation of the star sensor's boresight, and complete the initial attitude capture. The recognition algorithm in this embodiment is not limited to subgraph isomorphism or pattern recognition or improved algorithms, such as triangle recognition, matching group method, grid algorithm, singular value decomposition and so on. The star sensor capable of independent navigation generally adopts a large field of view structure, a multi-star vector attitude determination method, and a low magnitude detection threshold. In this embodiment, the navigation star counting method can be used.
[0021] Step 2: I...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More