

Lightweight peccancy parking detection device based on full view vision
A panoramic vision and illegal parking technology is applied in the field of lightweight panoramic vision-based illegal parking detection devices, which can solve the problems of scratches, the difficulty of small and lightweight parking detection devices, and the obstacles to sidewalk traffic.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
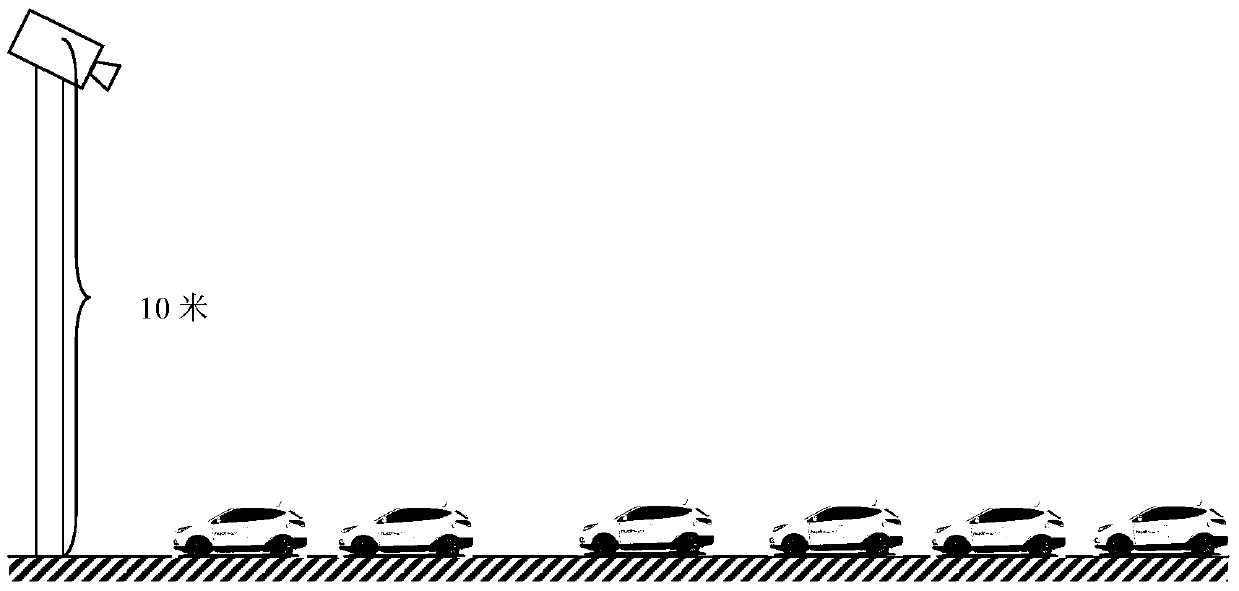
[0086] refer to figure 1 , 2 , 5-11, a light-weight panoramic vision-based parking violation detection device, including high-definition cameras installed at various measurement points on the road, and the high-definition cameras are arranged at about 10 meters above the roadside lane, and The direction of the lane is parallel to the lane, and the horizontal axis of the imaging plane of the high-definition camera is parallel to the ground plane, as shown in the attached figure 1 shown.
[0087] The microprocessor that is used for carrying out illegal parking detection according to the video data of high-definition camera, described microprocessor comprises microprocessor system hardware and microprocessor software, it is characterized in that: described microprocessor hardware is made up of CPU, image Memory, input unit, storage unit, voice playback unit, communication unit, video interface, RAM (Random Access Memory) and ROM (Read-only Memory), as attached Figure 7 As s...
Embodiment 2
[0138] refer to Figure 3 ~ Figure 11 , as another preferred solution: install the high-definition camera on the side of the road, as attached image 3 Shown; HD video camera adopts panoramic vision sensor, and described panoramic vision sensor is made of two mirrors forming an angle and a camera facing the mirror; the angle between the two mirrors is 180°-2γ, and the two The width value of the mirror surface on the front view is W, the height value on the side view is R, and the width value W and the height value R of the two mirror surfaces are located within the imaging range of the camera; on the side view, the center of the camera The axis forms an angle η with the central axis of the vertical pole, and the mirror surface forms an ε angle with the road side of the horizontal plane; The central axis is parallel, and the focal length of the camera is f;
[0139] The installation height of the panoramic vision sensor is H, the visual range of the road along the road is L, ...
Embodiment 3
[0145] Refer to attached Figures 9 to 11 , the rest is the same as implementation 1 and implementation 2, the difference is that the customization of roadside lanes, the automatic generation of sampling points and the detection of illegal parking analysis are completed on two different devices; among them, the customization of roadside lanes, sampling The automatic generation of points is completed on the PC, and the analysis and processing detection of illegal parking is completed on the embedded device; the SOCKET communication method is used between the customized PC and the embedded device for analysis, processing and detection, as shown in the attached Figure 9 Shown; The specific implementation method is: at first the roadside lane information and the sampling point information on the roadside lane that PC has customized, the processing flow of lane customization and generation sampling point is as attached Figure 11 shown; then, through SOCKET communication to the em...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More