Special testing device and method for correcting welding track based on machine vision
A technology of machine vision and testing equipment, used in measurement equipment, optical equipment, auxiliary equipment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
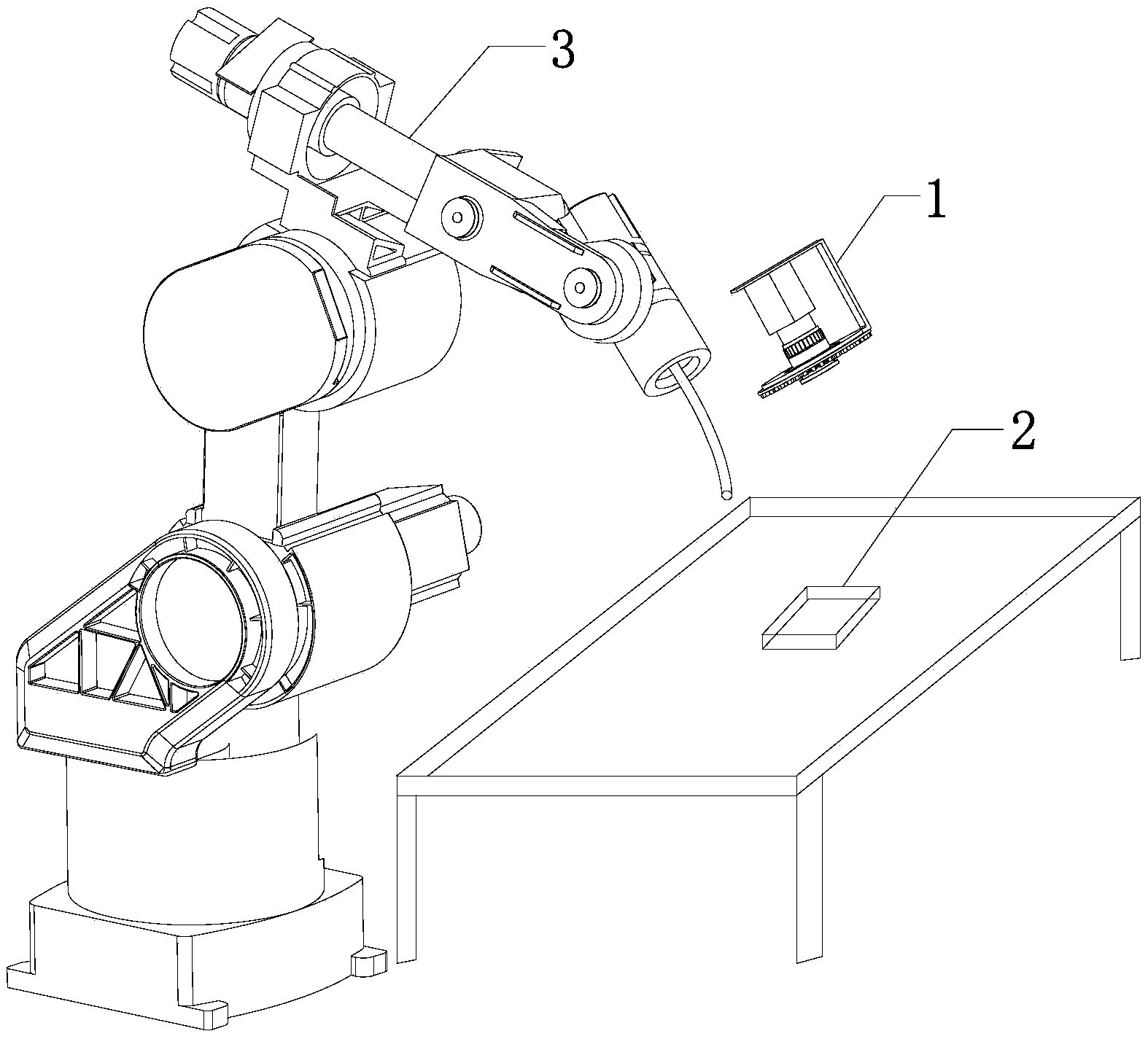
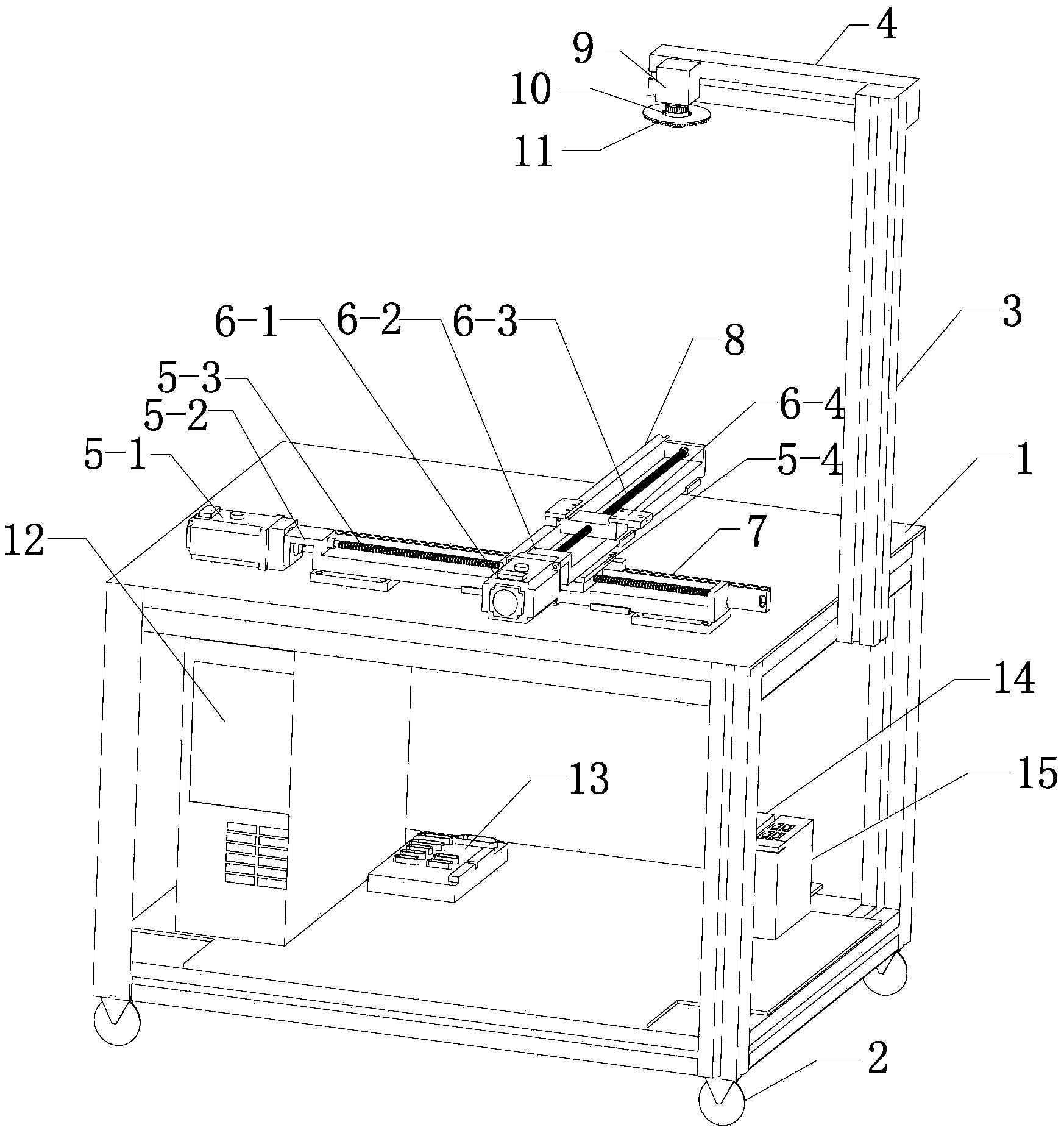
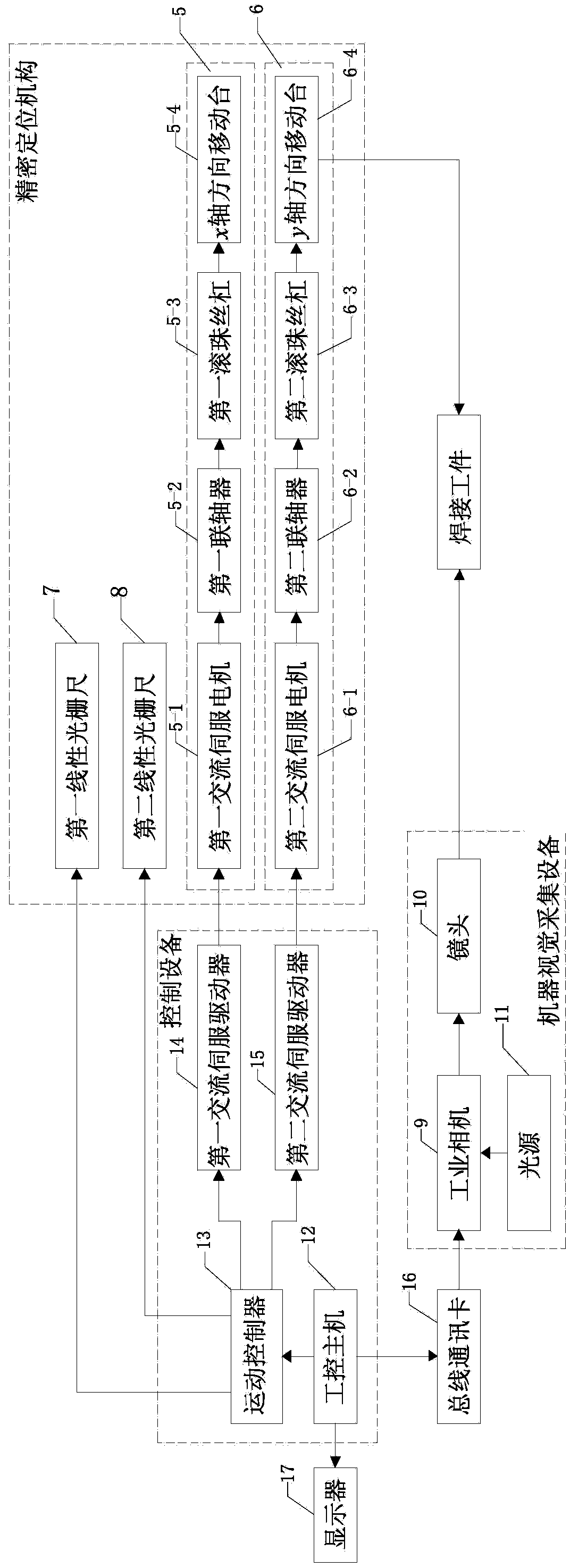
[0042] like figure 2 and image 3 As shown, the special test device for welding trajectory correction based on machine vision in this embodiment includes a workbench 1, a precision positioning mechanism, machine vision acquisition equipment and control equipment. The workbench 1 adopts a frame structure 1, and the frame structure 1 is The frame structure of 1000*800*700mm is made of 40*40 standard aluminum profiles, four wheels 2 are arranged on the bottom to make the workbench 1 move, and a vertical bracket 3 is arranged on one side, on which the vertical bracket 3 A horizontal support 4 is vertically fixed on the top, the precision positioning mechanism is arranged on the top plane of the frame structure 1, the control device is arranged inside the frame structure 1, and the machine vision acquisition device is fixed on the horizontal support 4. The machine vision acquisition device is located above the precise positioning mechanism; the precise positioning mechanism inclu...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap