

Trunk-simulating mechanical arm unit device
A technology of unit device and mechanical arm, which is applied in the field of robotics, can solve the problems of bulky air compressor, large system footprint, complex device structure, etc., and achieve the effect of compact structure, good mobility and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
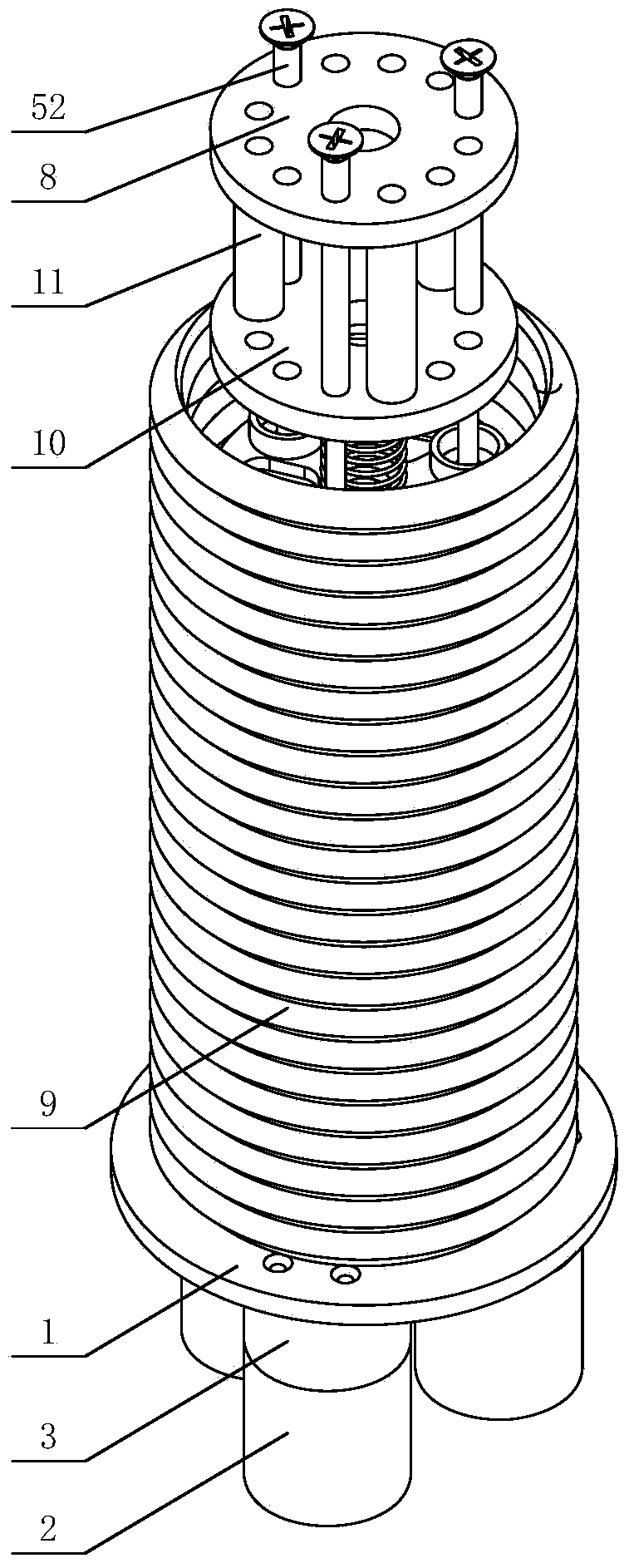
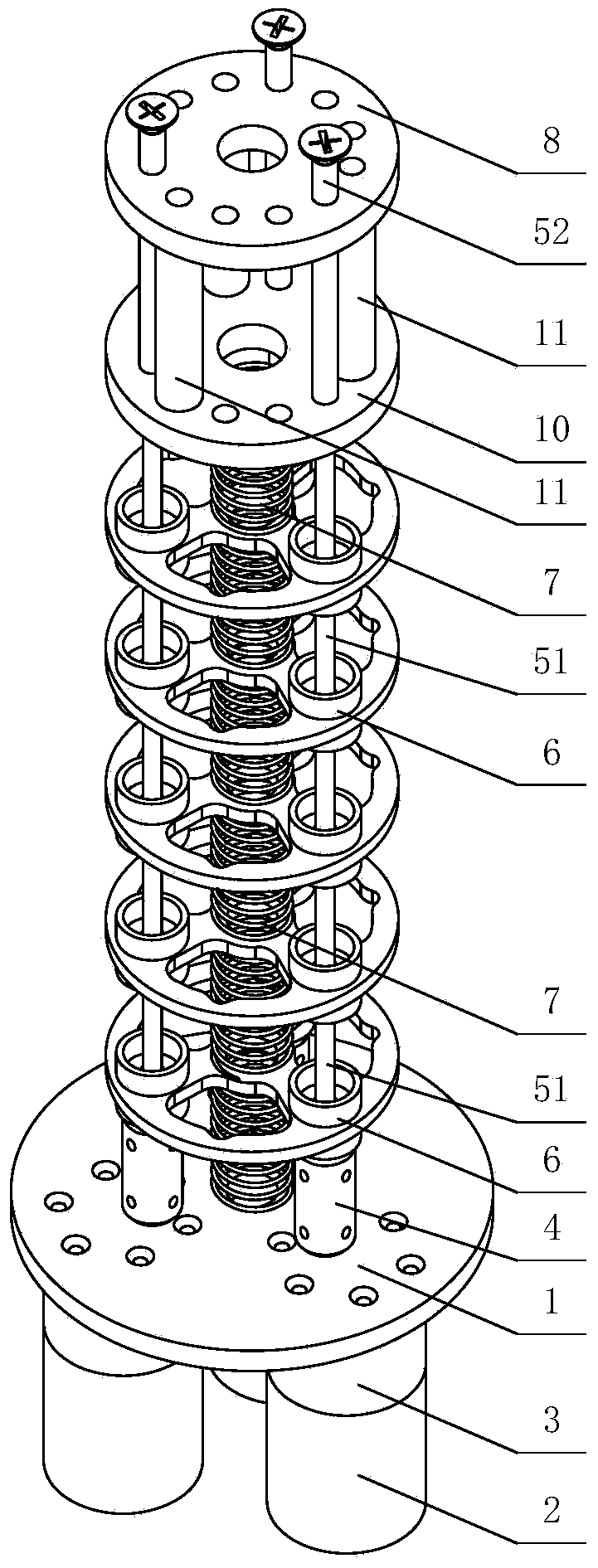
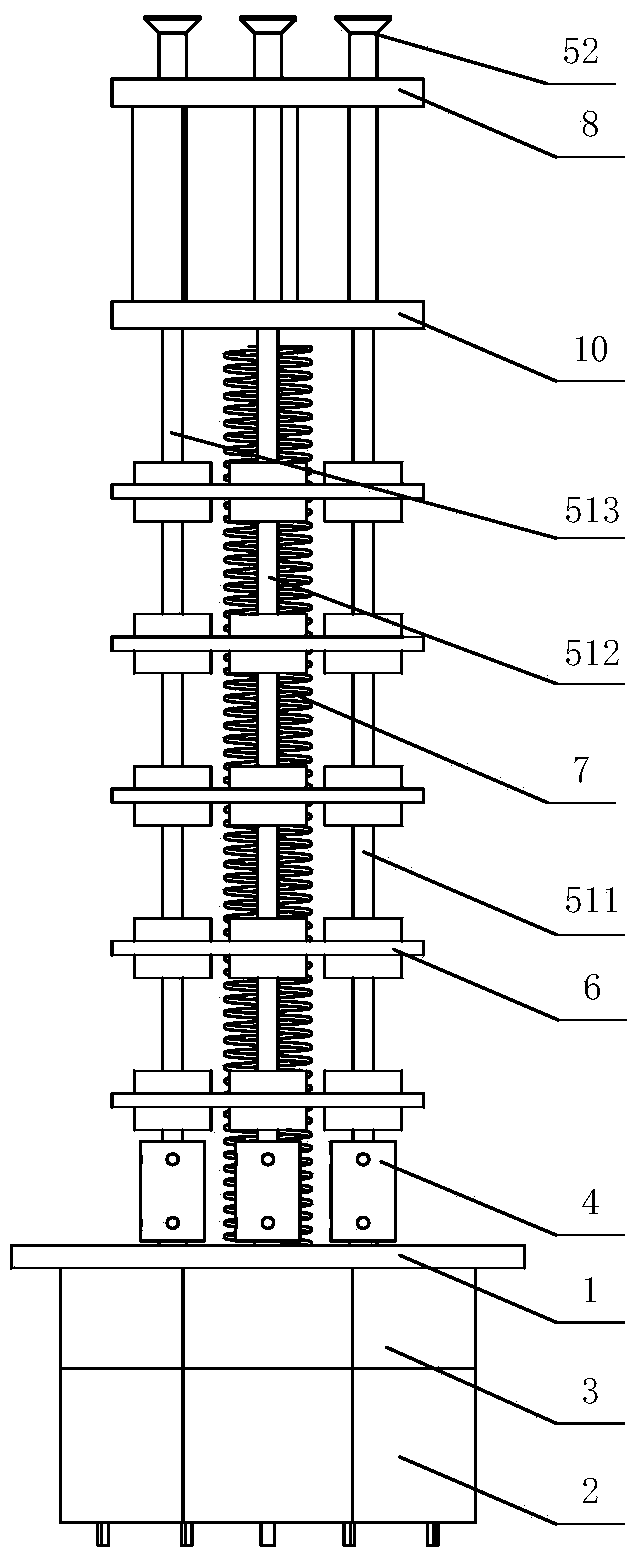
[0038] The embodiment of a kind of artificial elephant trunk mechanical arm unit device designed by the present invention is as follows: figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 and Figure 6 shown. The artificial elephant trunk mechanical arm unit device includes a base 1, at least 2 artificial muscle assemblies, at least 2 intermediate pieces 6 and an end piece 8; the artificial muscle assembly includes a driver 2, a transmission mechanism 3 and a flexible screw assembly; the The flexible screw assembly includes a flexible rod 51 and a screw 52; the driver 2 is fixed to the base 1, the output shaft of the driver 2 is connected to the input shaft of the transmission mechanism 3, and the output shaft of the transmission mechanism 3 is connected to the flexible...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More