

Method for obtaining inertial navigation system attitude based on DGPS (differential global positioning system)
An inertial navigation system and acquisition method technology, applied in radio wave measurement system, satellite radio beacon positioning system, navigation and other directions, can solve the problems of small advantages, low cost performance, difficult to meet long-distance application requirements, etc., and reach the scope of application Wide and simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
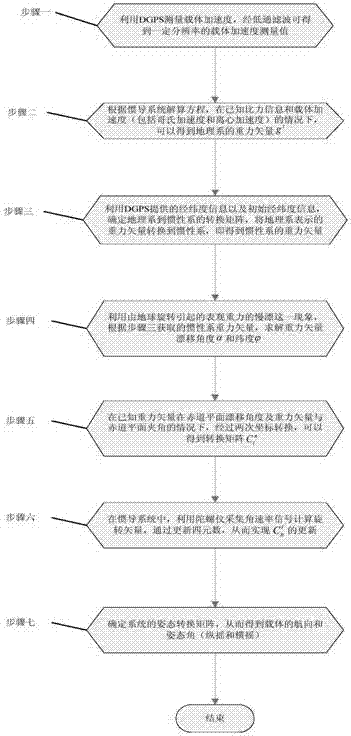
[0022] A kind of DGPS-based inertial navigation system attitude solution method of the present invention comprises the following steps:
[0023] Step 1: Use DGPS to measure the carrier acceleration, and after low-pass filtering, the carrier acceleration measurement value with a certain resolution can be obtained.
[0024] Specifically, the calculation of the carrier motion acceleration usually adopts the position differential method, that is, the carrier acceleration is obtained by performing two consecutive digital differences on the GPS carrier phase double-difference dynamic positioning results. Because GPS carrier phase observations are affected by factors such as receiver noise, multipath effects, atmospheric delays in the troposphere and stratosphere, and ephemeris errors, and the digital difference will amplify high-frequency noise, it is neces...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More