

Cylindrical neighborhood applicable to multi-view point cloud processing and searching method thereof
A cylindrical, multi-view technology, applied in image data processing, using optical devices, measuring devices, etc., can solve problems such as search errors, missing neighborhood data, and incomplete neighborhoods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
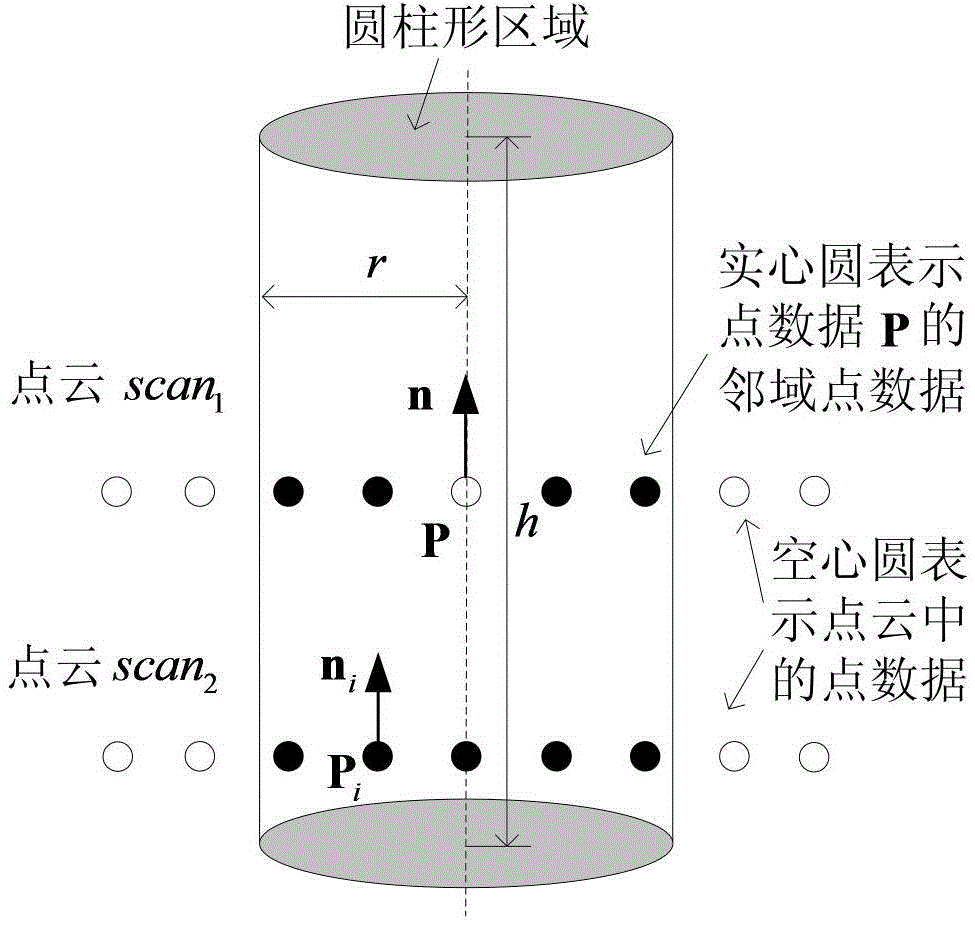
[0055] This embodiment proposes a cylindrical neighborhood and its search method suitable for multi-view point cloud processing, to figure 1 Point cloud scan in 1 The cylindrical neighborhood of midpoint data P and its search method are illustrated as follows:
[0056] figure 1 Midpoint cloud scan 1 and point cloud scan 2 have the same direction, overlap with each other and the point cloud gap size is G. point cloud scan 1 The cylindrical neighborhood of the midpoint data P is the point data set Ω contained in the cylindrical area with the point data P as the center, the normal vector n direction of the point data P as the axis direction, the radius of the bottom surface is r, and the height is h . The point data set Ω contains both the point cloud scan 1 The point data located in the cylindrical area in the middle contains the point cloud scan 2 Point data in a cylindrical area in . It should be emphasized that the point data in the point data set Ω satisfies both th...
Embodiment 2
[0103] Such as Figure 6 and Figure 7 As shown, the traditional spherical neighborhood search method and the search method of the present invention are used to search for two parallel and overlapping point cloud scans with a certain gap. 1 with scan 2 The neighborhood of the midpoint data and calculate the center of gravity. From Figure 6 It can be seen that when the traditional spherical neighborhood search method is used to search the neighborhood, the two-layer CentroidLayer is finally obtained after calculation. 1 with CentroidLayer 2 , and the center of gravity CentroidLayer 1 Bias point cloud scan 1 One side, while the center of gravity CentroidLayer 2 Bias point cloud scan 2 side. The reason for this phenomenon is that the search point cloud scan 1 When the neighborhood of the midpoint data, P 1 For example, the neighborhood point data contained in the spherical neighborhood is in the scan 1 The number in the scan is more than 2 In the number, the center ...
Embodiment 3
[0105] As shown in Figure 8(a), Figure 8(b), Figure 9(a) and Figure 9(b), the traditional spherical neighborhood search method and the cylindrical neighborhood search method proposed by the present invention are used to search for a thin wall Neighborhood information of a point data in the leaf point cloud, where the black dots in Figure 8(a), Figure 8(b), and Figure 9(a) represent the searched neighborhood. The radius of the spherical neighborhood is set to be the same as the radius of the base of the cylindrical neighborhood in the search. From Figure 8(a) and Figure 8(b), it can be seen that when the traditional spherical neighborhood search method is used to search, some point data on the back of the blade are mistaken for the neighborhood of a certain point data on the front (the black part in the figure indicates Searched Neighborhood), resulting in an error. From Figure 9(a) and Figure 9(b), it can be seen that when the method of the present invention is used to search...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More