

Movement subdivision control method of wheeled mobile robot
A mobile robot, segmented control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
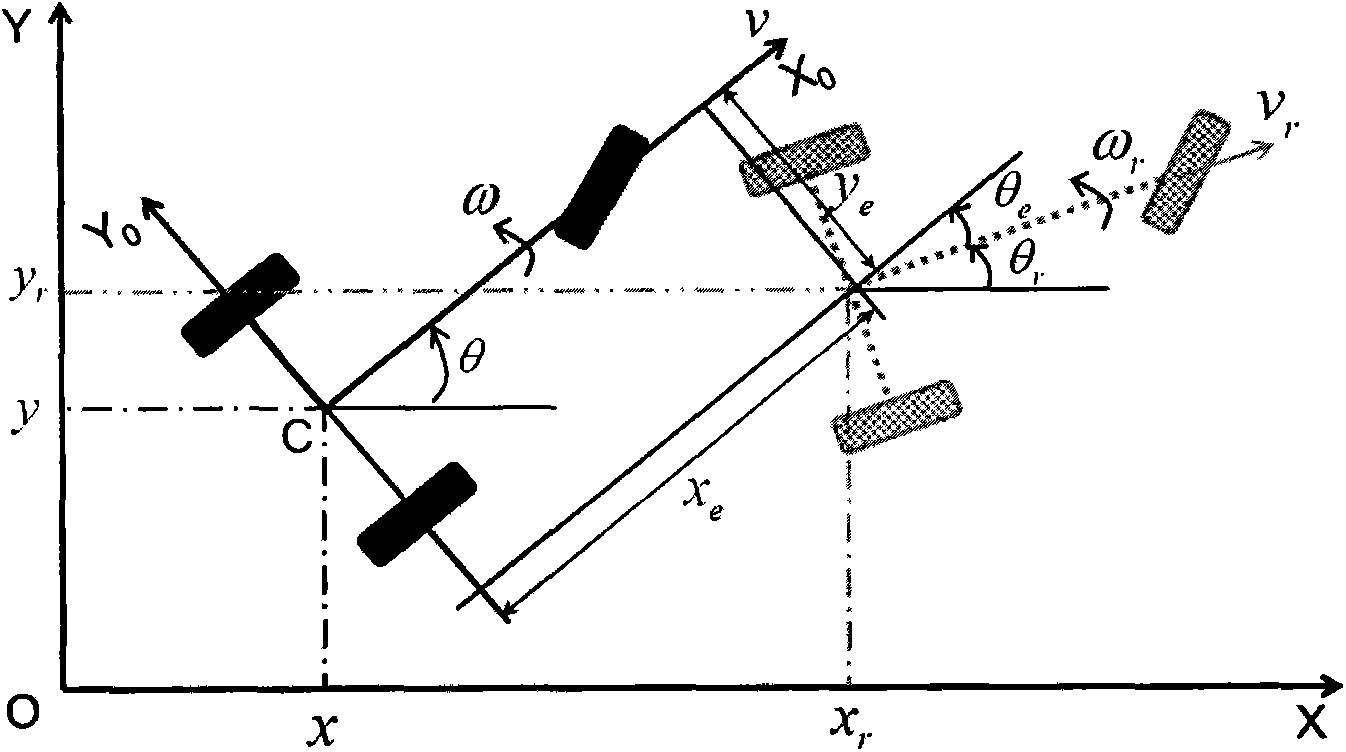
[0051] Such as figure 1 As shown, in the schematic diagram of the tracking error of the wheeled mobile robot in the embodiment of the present invention, x and y represent the position coordinates of the wheeled mobile robot, θ represents the azimuth of the vehicle body; the current actual pose of the wheeled mobile robot is expressed as p c (t)=[x(t)y(t)θ(t)] T , any given reference pose is denoted as p r (t)=[x r (t) y r (t) θ r (t)] T ; Pose error is X e (t)=[x e (t) y e (t) θ e (t)] T ;The actual driving speed of the current driving wheel is q c (t) = [v(t) ω(t)] T , the reference driving speed is q r (t)=[v r (t) ω r (t)] T , where v r is the reference linear velocity, ω r is the reference angular velocity.
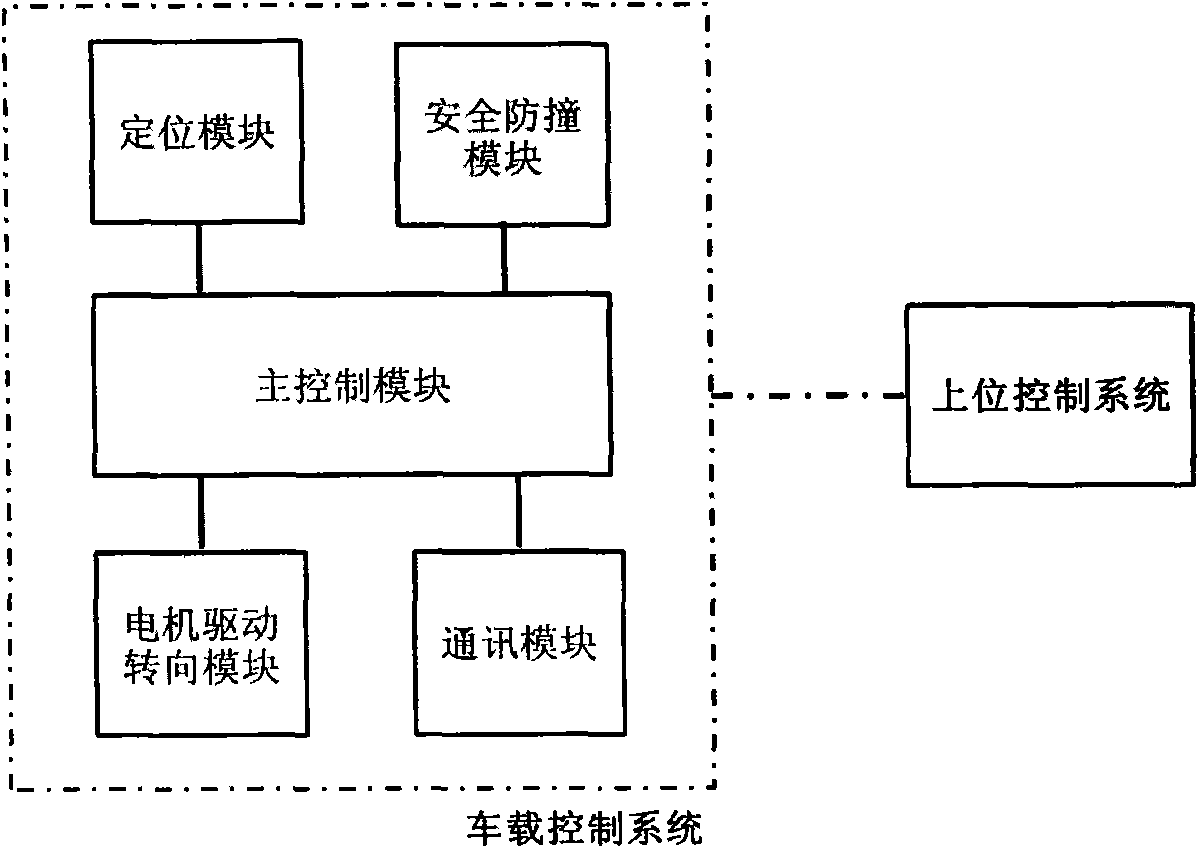
[0052] Such as figure 2 As shown, the wheeled mobile robot system used in the embodiment of the presen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More