Unmanned aerial vehicle ground sliding deviation rectification control device and method
A control device and unmanned aerial vehicle technology, applied in the field of aircraft control, can solve problems such as deviation correction performance degradation, system divergence, and difficulty in adapting deviation correction control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
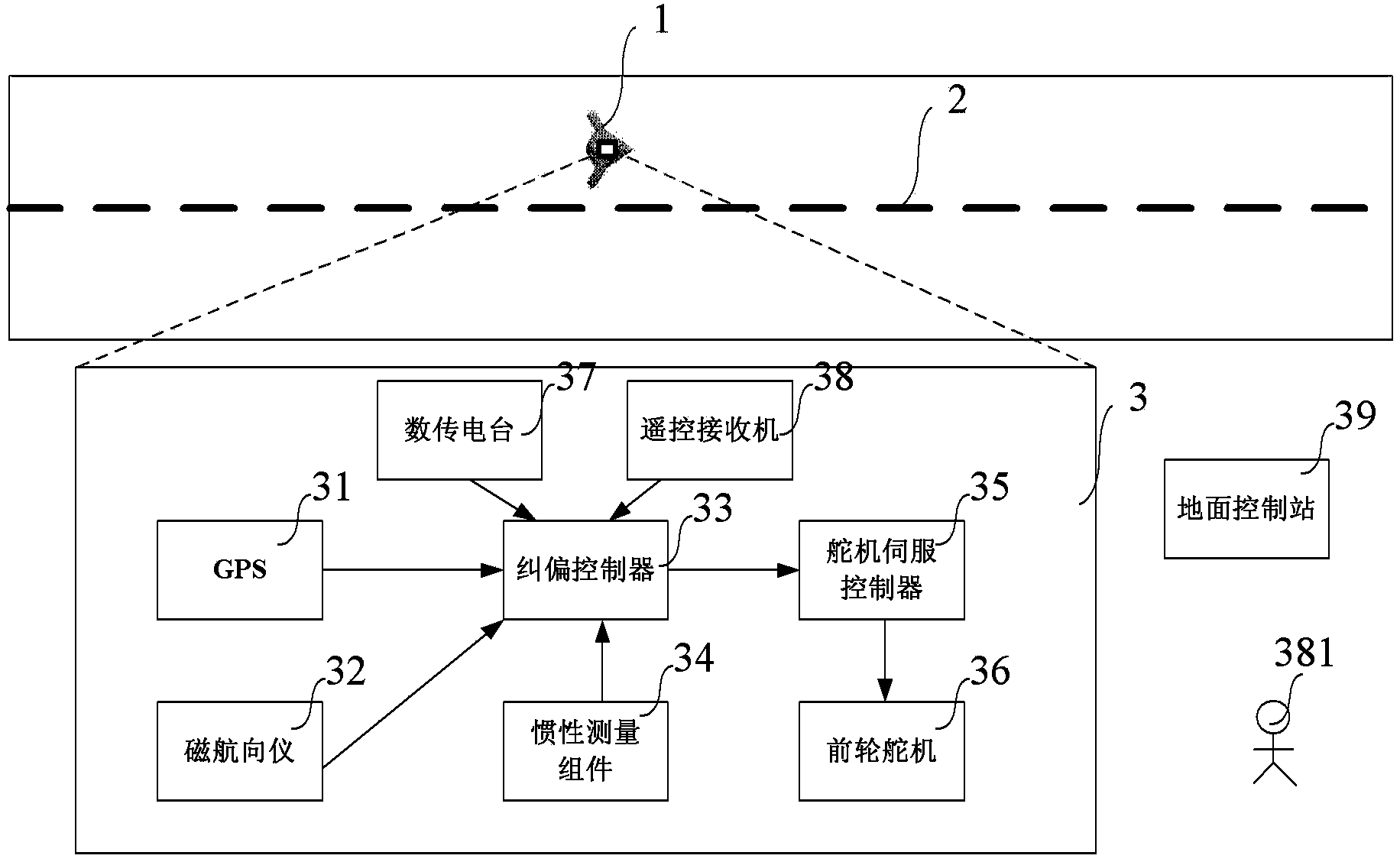
[0026] figure 1 It shows the structural diagram of the UAV sliding deviation correction control device in the present invention. like figure 1 As shown, the unmanned aerial vehicle sliding deviation correction control device includes a GPS module 31, a magnetic heading instrument 32, a deviation correction controller 33, an inertial measurement component 34, a steering gear servo controller 35, a front wheel steering gear 36, a digital transmission station 37, a remote control Receiver 38, ground control station 39. The UAV sliding deviation correction control device 3 is installed on the UAV 1, so that the UAV 1 always performs trajectory tracking along the runway centerline 2 during the autonomous take-off and landing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



