

Linear supersonic motor-based two-finger parallel connection micro operation hand and operation method
A linear ultrasonic motor and ultrasonic motor technology, applied in the field of biomedical engineering, can solve problems such as limiting the ability of micro-manipulators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
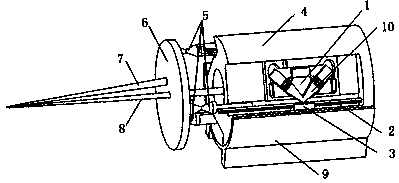
[0020] A three-degree-of-freedom two-finger parallel micromanipulator based on a linear ultrasonic motor, the manipulator includes an arm and a hand, such as image 3 shown.
[0021] The arm and hand of the operating hand include three linear ultrasonic motors 1, guide rail 2, slider 3, arm 4, flexible joint 5, disc 6, short finger 7, long finger 8, base 9, motor stator 10, Such as image 3 shown. Three linear ultrasonic motors 1 are evenly distributed around the central axis of the arm 4, with a difference of 120° between any two, such as figure 2 shown. Each linear guide rail 2 is respectively connected with a flexible joint 5, and three flexible joints 5 are connected with the disc 6 and controlled to move to form a three-degree-of-freedom parallel motion. The long fingers 8 are fixed on the arm 4 and pass through the central hole of the disc 6 , and the short fingers 7 are fixed on the disc 6 at an angle of 20°-25°, forming chopsticks with the long fingers 8 . The lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More