

Adaptive Steering System and Implementation Method of Dual-crawler Traveling Device
A technology of traveling device and steering system, which is applied in the direction of automatic steering control parts, steering mechanism, steering rod, etc., and can solve the problems of low accuracy of the traveling track of the double-track traveling device, affecting the safety and working efficiency of open-pit mining machinery, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0096] The present invention will be described in detail below in conjunction with the accompanying drawings.
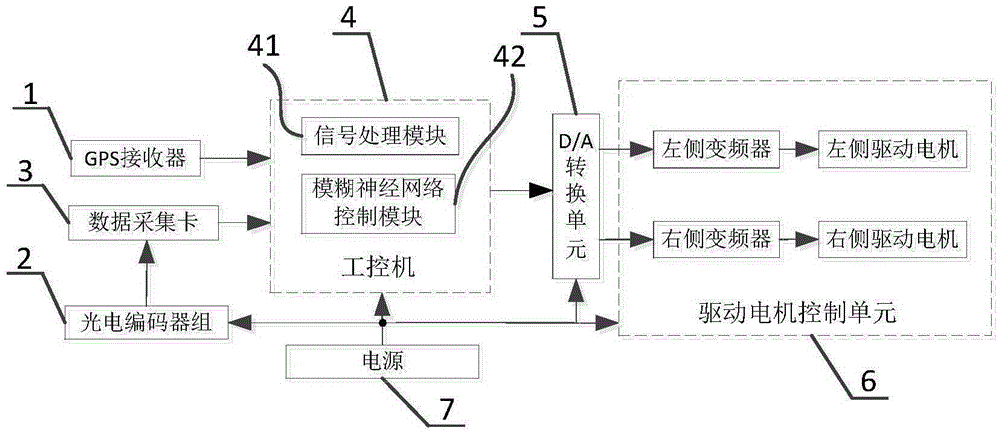
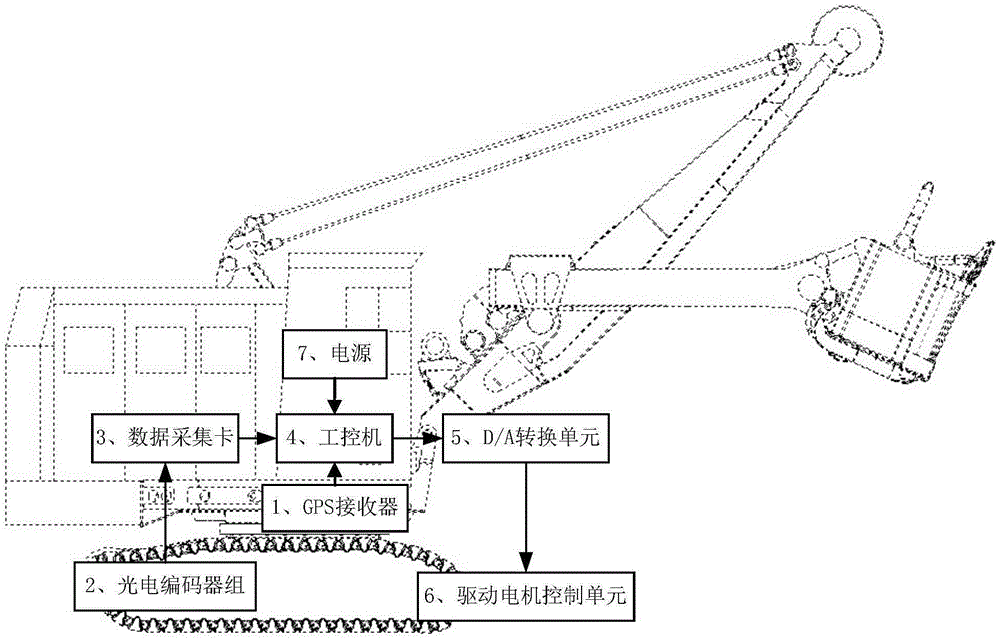
[0097] figure 1 It is an overall schematic diagram of the self-adaptive steering system of the dual-crawler traveling device of the present invention, which includes a GPS receiver 1, a photoelectric encoder group 2, a data acquisition card 3, an industrial computer 4, a D / A conversion unit 5, and a drive motor control unit 6 and power supply7. The photoelectric encoder group 2 is connected with the data acquisition card 3; the output end of the GPS receiver 1 and the data acquisition card 3 is connected with the input end of the industrial computer 4, and the output end of the industrial computer 4 is connected with the D / A conversion unit 5 The input end is connected; the output end of the D / A conversion unit 5 is connected with the drive motor control unit 6; the whole system is powered by the power supply 7.
[0098] The GPS receiver 1 is installed on the doub...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More