

Method for controlling PID controller route based on fuzzy control
A technology of fuzzy controller and path control, applied in two-dimensional position/channel control, etc., can solve the problem of self-tracking intelligent vehicles losing effective control, etc., and achieve low power consumption, good real-time performance, and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The technical solutions in the embodiments of the present invention will be clearly and completely described and discussed below in conjunction with the accompanying drawings of the present invention. Obviously, what is described here is only a part of the examples of the present invention, not all examples. Based on the present invention All other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0031] In order to facilitate the understanding of the embodiments of the present invention, specific embodiments will be taken as examples for further explanation below in conjunction with the accompanying drawings, and each embodiment does not constitute a limitation to the embodiments of the present invention.
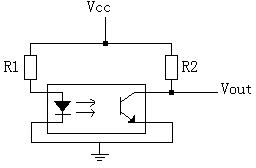
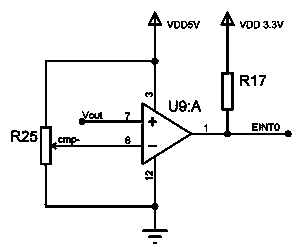
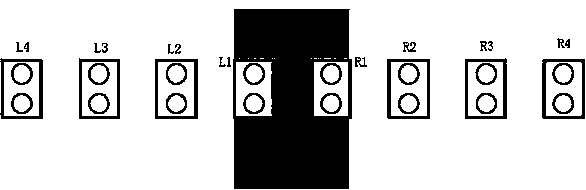
[0032] The scheme adopted in the present invention is: laying a guiding line that is in sharp contrast with the color of the road surface in the traveling area of the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More