

Vision localization, measurement and control method, system and experimental platform for automatic refueling dead zone of unmanned aerial vehicle
A technology of automatic refueling and visual positioning, applied in aircraft parts, transportation and packaging, etc., can solve the problem of not being able to play a positioning role, and achieve the effect of small error and reducing the effect of random noise.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
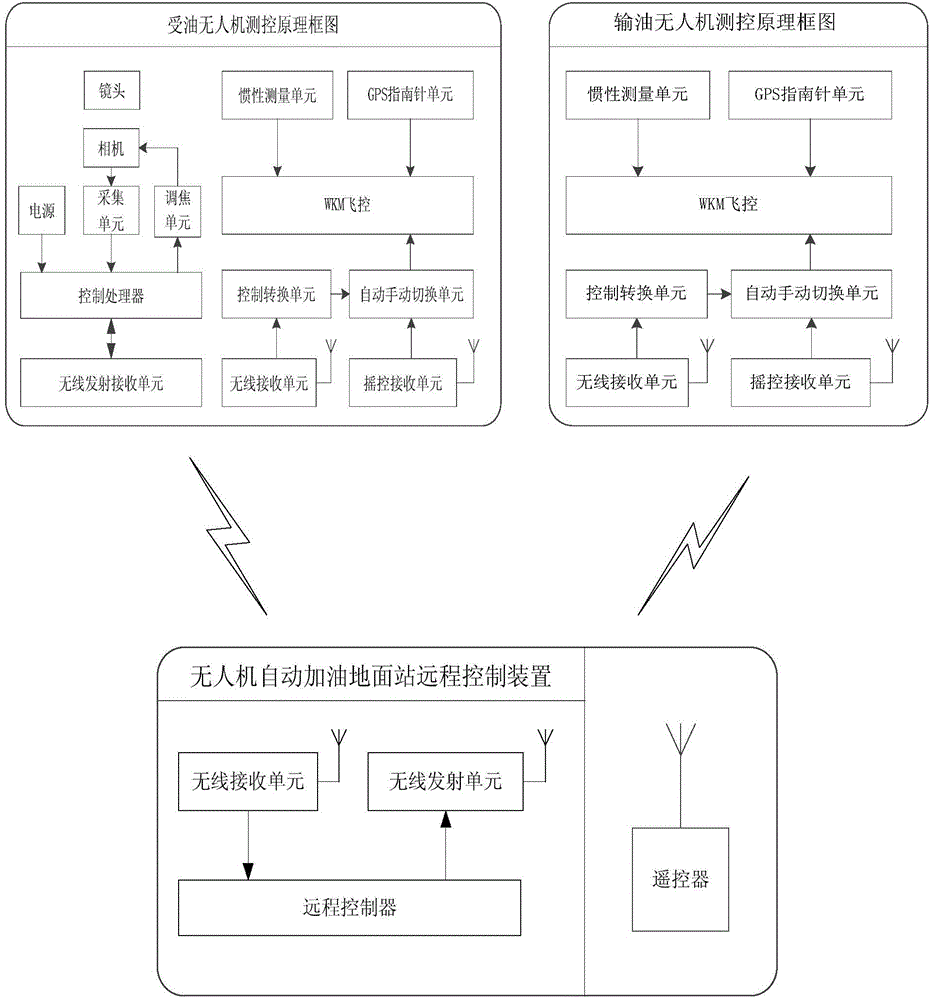
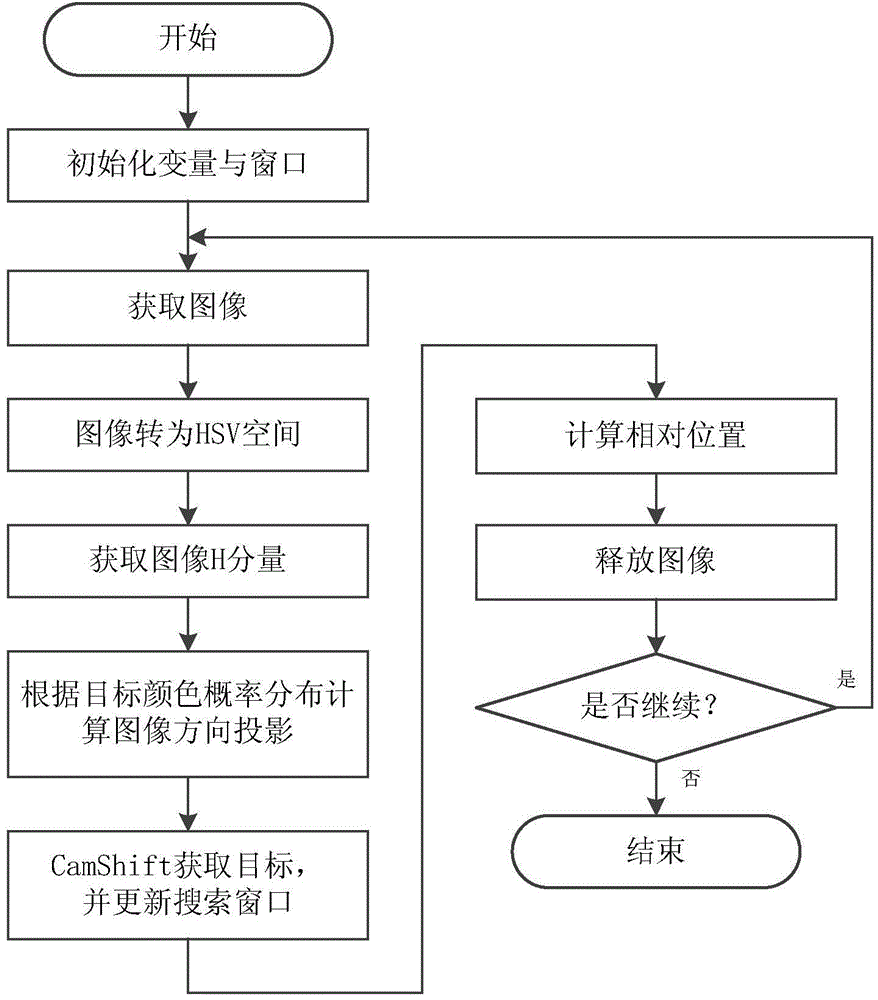
[0032] The visual positioning measurement and control method for the automatic refueling blind area of the UAV in the present invention mainly uses the machine vision detection method to perform pattern recognition calculation and positioning on the refueling probe and the oil delivery drogue sleeve; then transmits the positioning data to the ground station, and the ground station filters the data and Calculate the control command through the control algorithm; finally send the control command to the aircraft side to control the aircraft (refueling UAV and refueling UAV) to achieve the purpose of automatic refueling.
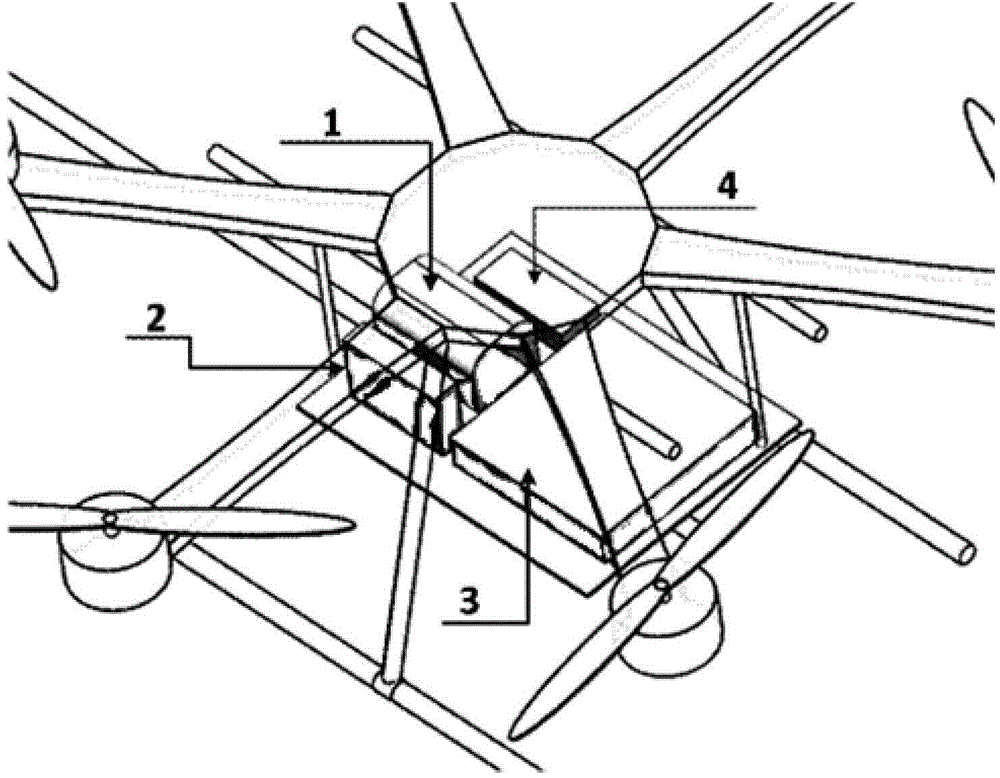
[0033] The present invention builds the following experimental platform to verify the feasibility of the method.
[0034] In the present invention, two S800 six-rotor aircraft are used as the oil-receiving UAV and the oil-delive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More