

Optimal control method based on data-driven single network structure
A technology of optimal control and network structure, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve the problems of difficult to establish complex system model, complex controller structure, etc., achieve simple controller structure, avoid The effect that is not easy to achieve and the theory is perfect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
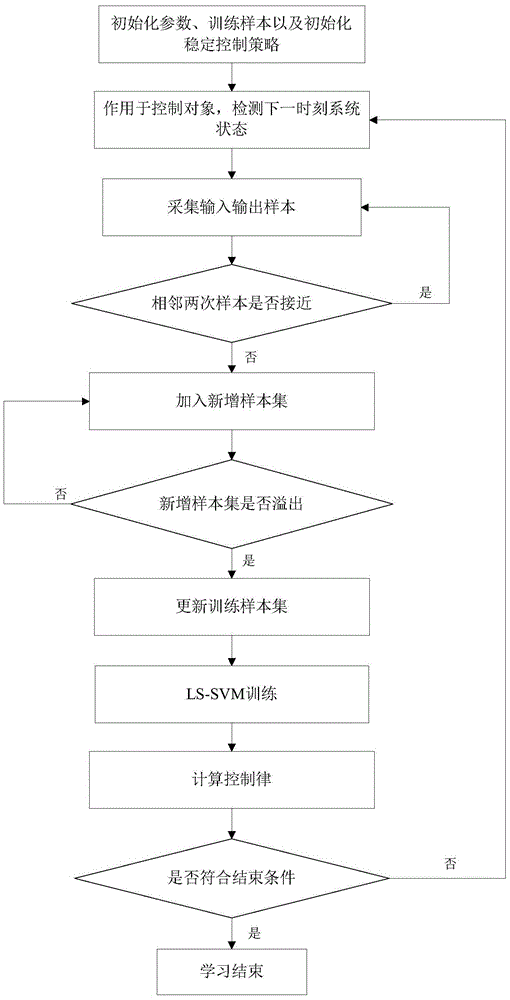
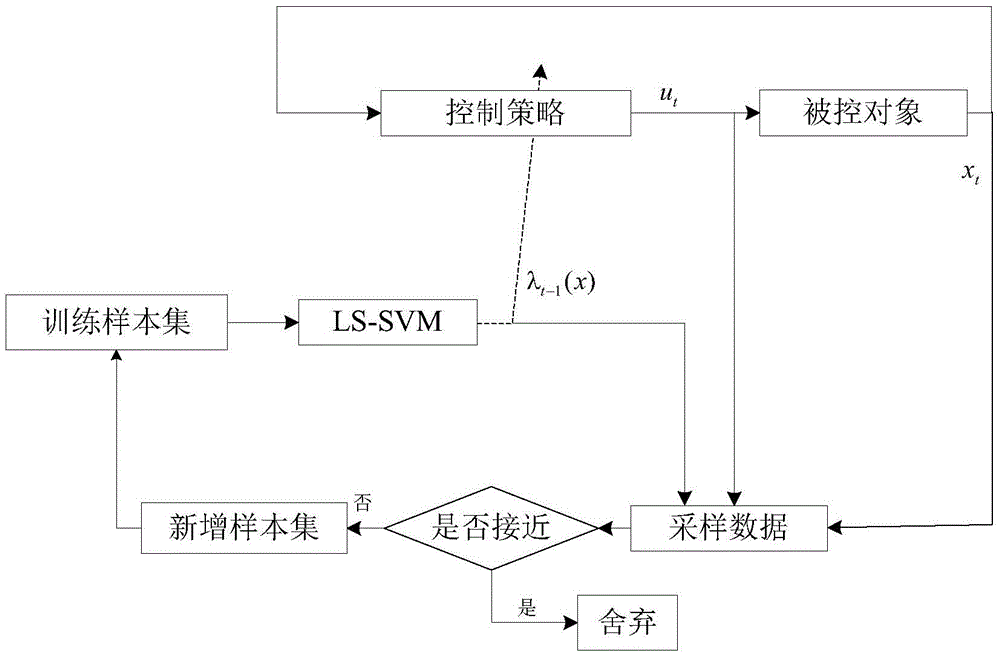
[0027] The present invention will be further described below in conjunction with the accompanying drawings.
[0028] The nonlinear system studied by the present invention can be expressed as follows:
[0029] x · = f ( x ( t ) ) + g ( x ( t ) ) u ( t )
[0030] Among them, x(t) is the system state variable with x appearing below t , f(x(t)) is the internal dynamic characteristics of the system, g(x(t)) is the input coupling matrix, u(t) is the control input vector and u appears below t . The initial state of the system is x(0)=x 0 , and f(x(t))+g(x(t))u(t) satisfies Lipschitz stability. For the sake of brevity, x(t) will be abbreviated as x and u(t) will be abbrev...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More