

Method and system of target immediate location and map establishing
A target and map technology, applied in the field of indoor target positioning and map construction, can solve the problems of manpower consumption, poor real-time performance, and large amount of calculation, etc., and achieve the effect of reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Below in conjunction with accompanying drawing, invention is described in further detail.
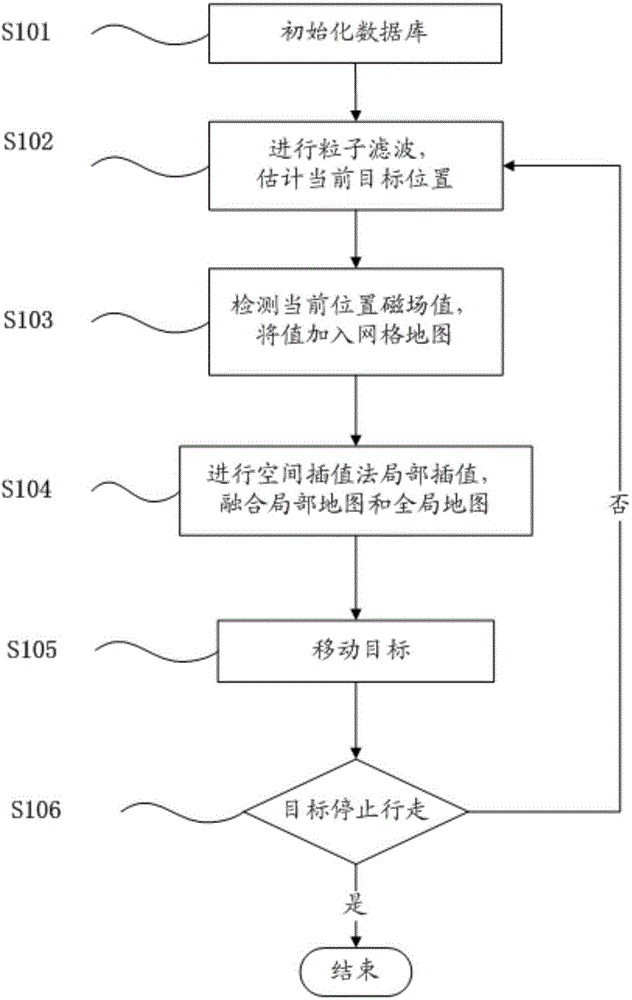
[0027] figure 1 It is a schematic diagram of the steps of the method for instant target location and map construction of the geomagnetic field in an embodiment of the present invention. Such as figure 1 As shown, the steps of the real-time target positioning and map construction method of an embodiment of the present invention include:
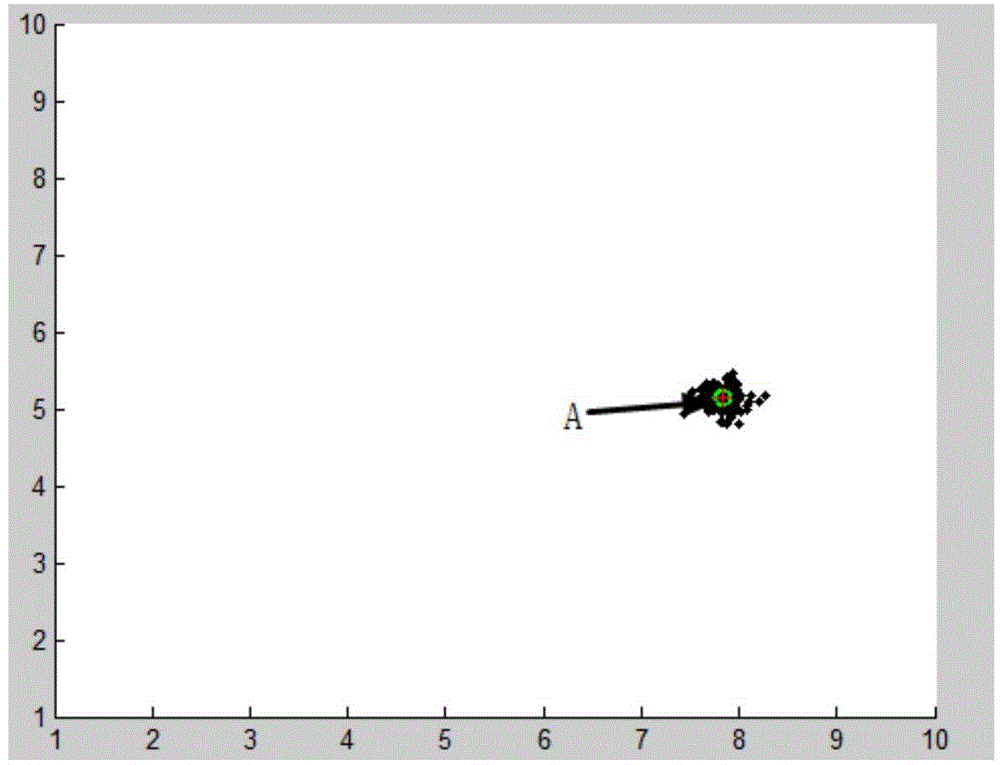
[0028] Step S101: Carry out on-the-spot measurement of the activity area where the target to be positioned is located (in this example, an activity room is taken as an example), obtain an indoor plan, and initialize the plan with a simulated grid map. The target to be positioned is combined with the data of the internal sensor of the target (l i , θ i ) among them, l i is the moving distance of the ith time, θ i is the deflection angle of the i-th movement. Determine its position in the simulation's initialization grid map. figure 2 The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More