

Hybrid type industrial robot
A kind of industrial robot and hybrid technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the difficult and difficult to achieve the retrieving action with trajectory requirements, cannot guarantee the movement of large working space, and cannot guarantee the small body size and other problems, to achieve the effect of fast and difficult retrieving action, difficult retrieving action, and high cost performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the technical problems, technical solutions and beneficial effects to be solved by the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
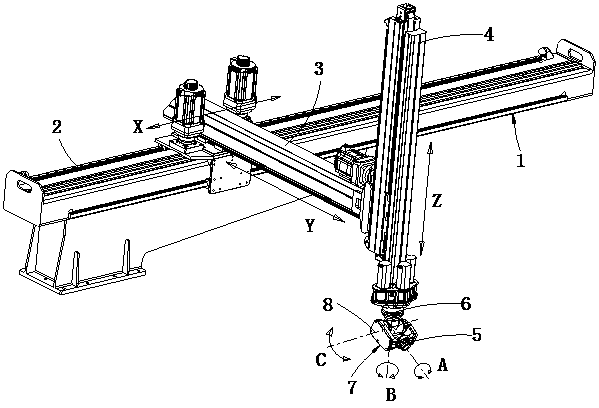
[0029] Please refer to figure 1 As shown, the preferred embodiment of the hybrid industrial robot of the present invention includes a linear motion part 1 and a joint motion part 7, and the linear motion part 1 is a Cartesian coordinate robot.
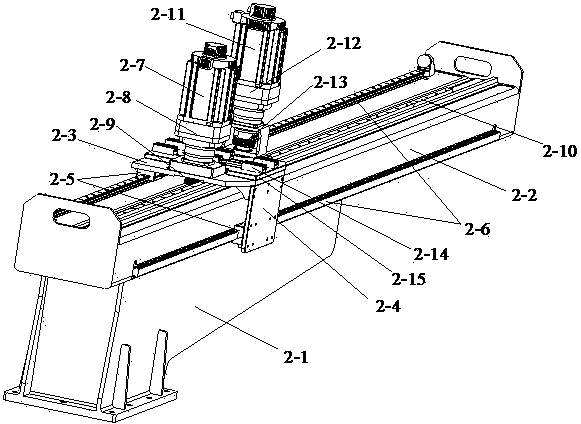
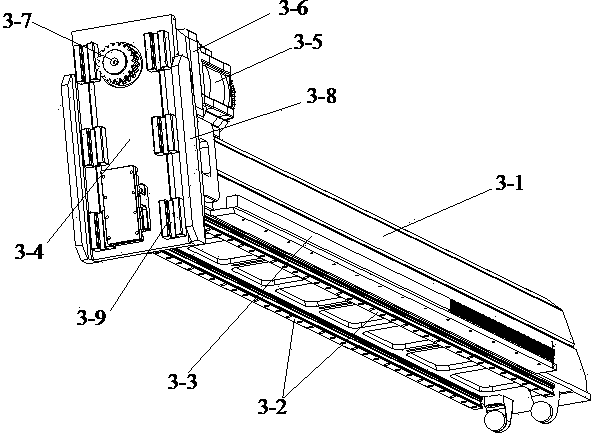
[0030] The linear motion part 1 includes an X-axis motion part 2 (corresponding to the X direction), a Y-axis motion part 3 (corresponding to the Y direction), and a Z-axis motion part 4 (corresponding to the Z direction). The Y-axis moving part 3 is installed on the X-axis moving part 2, the X-axis moving part 2 drives ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More