

Method for selecting target aiming point on tail section based on convex hull calculation
A technology of convex hull calculation and aiming point, which is applied in calculation, computer parts, image data processing, etc., to achieve the effect of small calculation complexity, strong flexibility and practicability, and fast calculation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
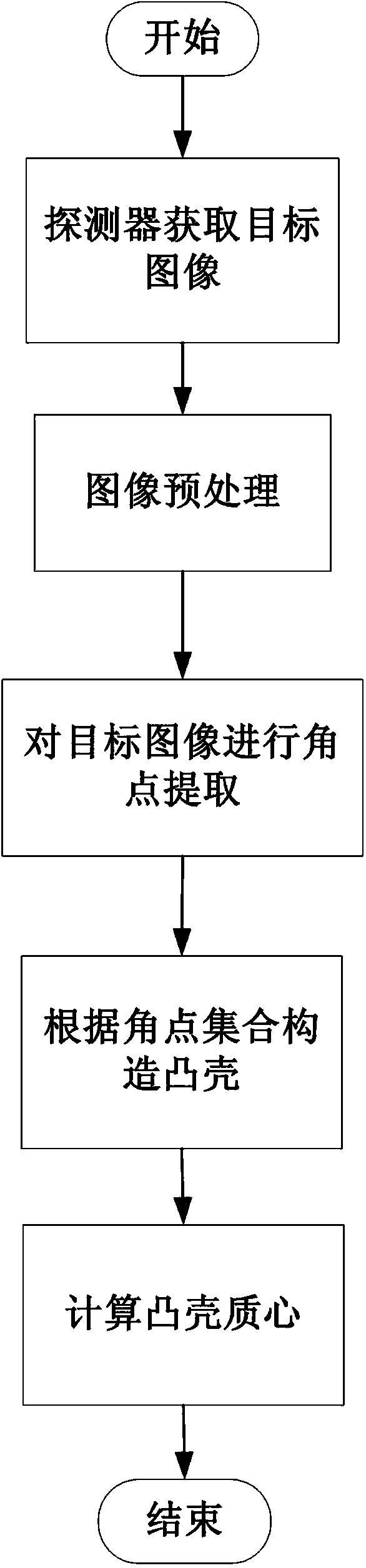
[0036] A method for selecting the aiming point of the terminal target based on convex hull calculation is used to realize the real-time and precise selection of the aiming point of the target by the radar detector. Such as figure 1 shown, including the following steps:
[0037] Step 1: Obtain an image of the target through the radar detector.
[0038] Step 2: Preprocessing the acquired target image. The processing methods are as follows: use statistical method to filter and denoise the image, use Ostu method to perform threshold segmentation, and use graphics method to open and close the binarized image. Preprocessing results such as figure 2 shown. Next, corner points are extracted from the processed image. The corner point extraction results are as follows image 3 shown.
[0039] Step 3, using the corner point coordinates extracted in Step 2, using a real-time convex hull calculation method to construct a convex polygon.
[0040] Since most of the extracted points ...
Embodiment 2
[0052] A method for selecting the aiming point of the terminal target based on convex hull calculation, which realizes the accurate delivery of relief materials to the disaster area. Include the following steps:
[0053] Step 1. Obtain the topography of the disaster area through the airborne detector, such as Figure 5 shown.
[0054] Step 2. Preprocess the acquired target image to remove interference noise, and then perform corner extraction on the processed image. The result of corner extraction is as follows: Image 6 shown.
[0055] Step 3, using the corner point coordinates extracted in Step 2, using a real-time convex hull calculation method to construct a convex polygon.
[0056] Since most of the extracted points are concentrated in the target area, the convex polygon constructed from these points can cover the target area. The construction method is as follows:
[0057] First, for the corner point coordinate p extracted in step 2 1 (x 1 ,y 1 ),p 2 (x 2 ,y 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More