

Virtual robot and real robot integration based picking system and method
A virtual robot and virtual system technology, applied in the direction of picking machines, agricultural machinery and implements, harvesters, etc., can solve the problems of low picking success rate and low visual positioning accuracy, and achieve the effect of reducing development costs and speeding up the development process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
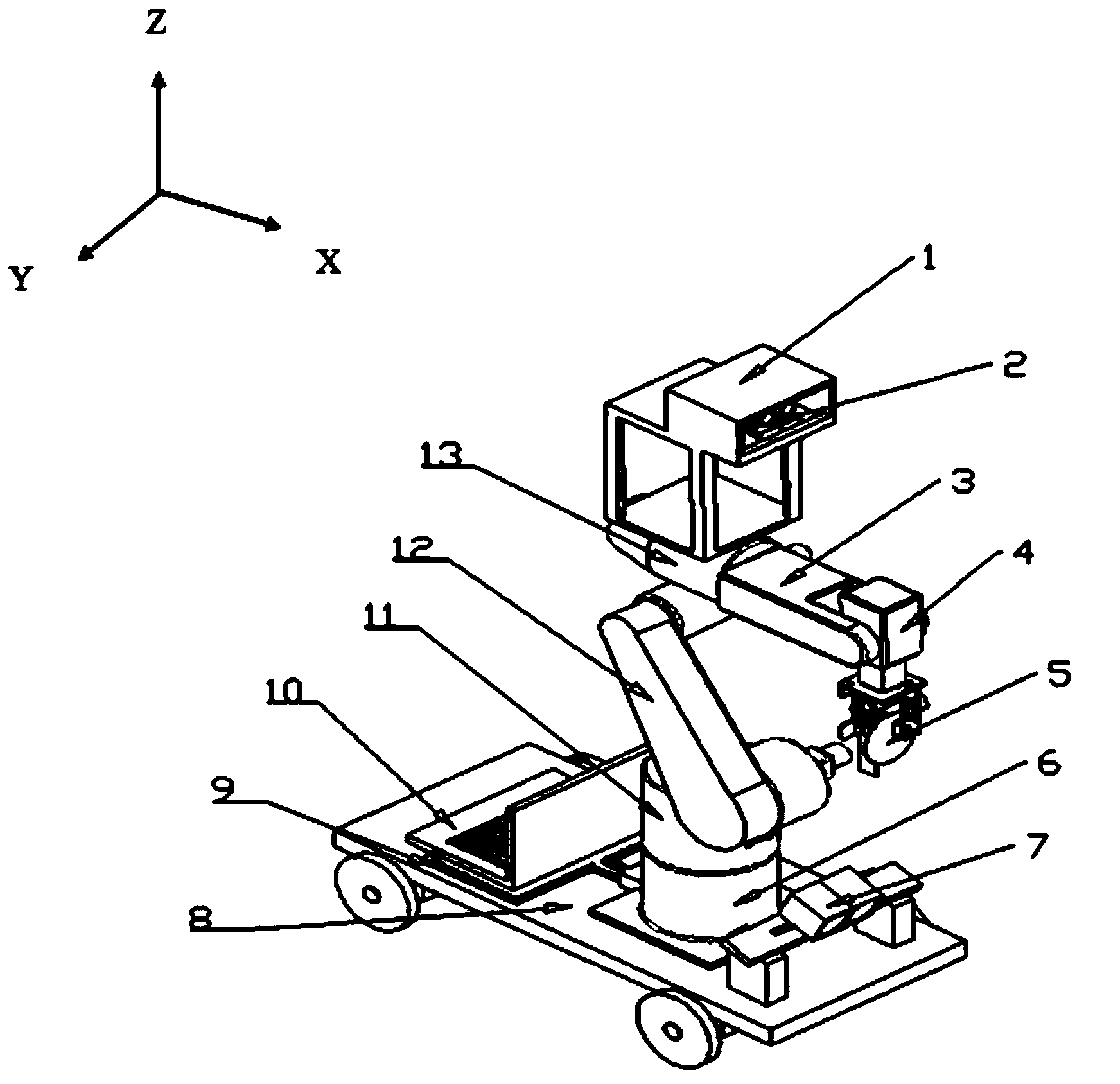
[0028] Such as figure 1 , the picking system based on the integration of virtual robot and real robot includes two parts: real robot and virtual robot picking simulation system. These two parts perform real-time data communication and feedback, and the two assist and correct each other. The real robot positioning vision system includes a consignment car 8, a binocular camera 2, a robot and its manipulator, and a visual positioning software system located in a computer 10. The manipulator of the robot includes a base 6 , a joint one 11 , a joint two 12 , a joint three 13 , a joint 4 , and an end effector 5 . Wherein, the robot base 6 is fixedly connected with the consignment trolley, and the robot is a 6-DOF robot. The binocular camera positioning system is developed by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More