

Autonomous ball-wheel-moving robot and control method thereof
A mobile robot and control method technology, applied in two-dimensional position/channel control and other directions, can solve the static instability of the robot and other problems, and achieve the effect of enhancing the ability of autonomous operation, reducing friction, and enhancing the ability to start autonomously.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
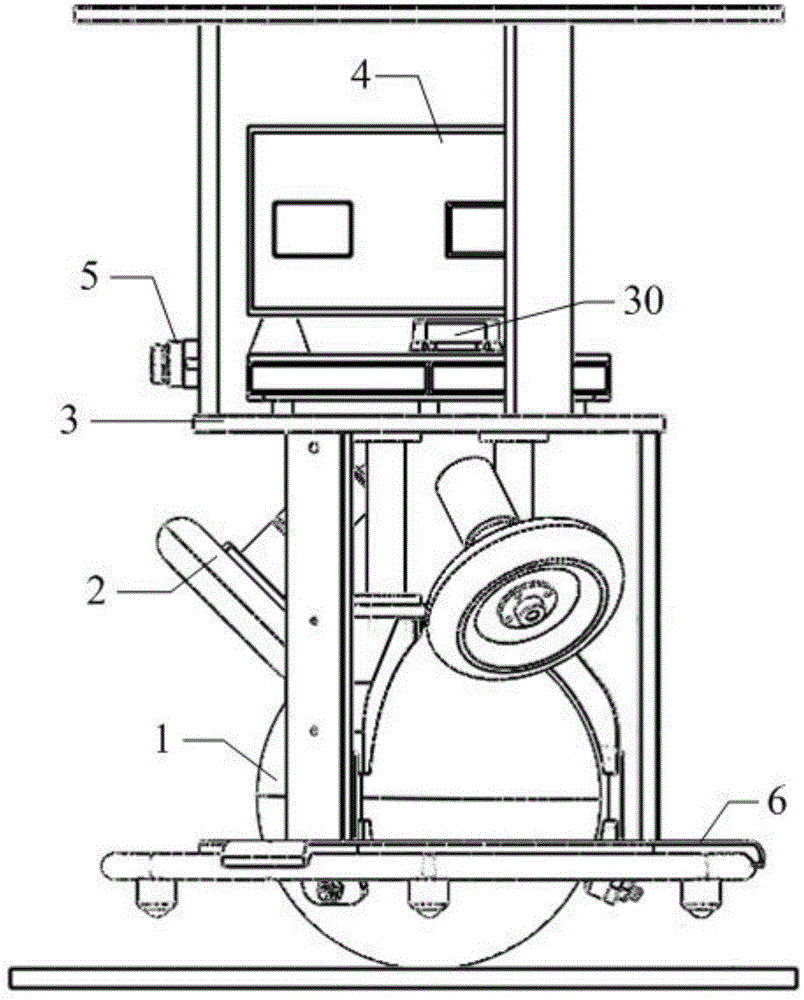
[0026] Embodiment 1: see attached figure 1 , an autonomous ball-wheel mobile robot, which includes: a spherical wheel 1, a universal wheel drive mechanism 2, a support structure 3, a booster bracket 6, a control module 4 and sensors;
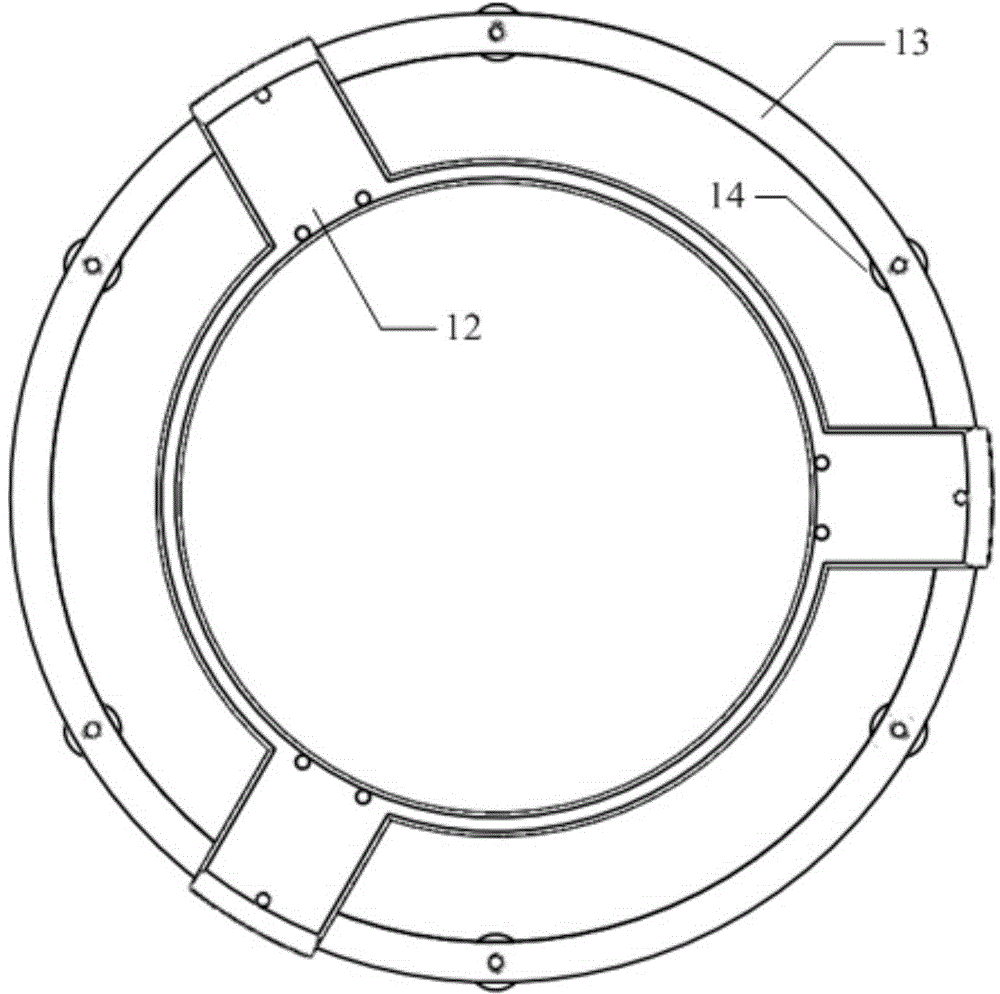
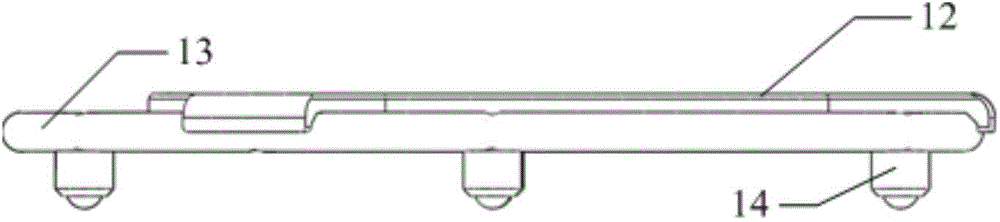
[0027] See attached figure 2 , 3 , the booster bracket 6 includes: bracket inner ring 12, bracket outer ring 13 and universal caster 14; bracket inner ring 12 and bracket outer ring 13 are connected by fixtures, universal casters 14 are symmetrically distributed on bracket outer ring 13, bracket inner ring 12 is socketed outside the spherical surface of the spherical wheel 1, and is fixedly connected with the support structure 3 through the bracket; when the robot is tilted, the universal caster 14 contacts with the ground to play a supporting role;
[0028] Sensor comprises: attitude sensor 30 and environment sensor 5; Environment sensor 5 is used for obtaining environment image; Attitude sensor 30 is used for obtaining the attitude data of ...
Embodiment 2
[0034] Embodiment 2: the control method of autonomous type ball-wheel mobile robot, it is based on the autonomous type ball-wheel mobile robot as described in embodiment 1, and comprises the following steps:
[0035] A. After the robot is powered on, the master controller completes the initialization operations of the interface, attitude sensor 30 and environment sensor 5;
[0036]B. The main controller reads the environmental data of the environmental sensor 5, processes the environmental data and identifies obstacles, and plans a feasible path; at the same time, the main controller reads the attitude data of the attitude sensor 30, and identifies the road condition in combination with the environmental data;
[0037] C. The main controller decides to select the robot to execute the motion control strategy through the road surface recognition result;
[0038] D. The main controller reads the data of the DC motor in the universal wheel drive mechanism 2, and calculates the spe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More