

Force sensing analog system based on C-EPS structure
A technology of C-EPS and simulation system, which is applied in the field of resistance loading simulators. It can solve the problems of bulky driver simulators, distorted force sense, and inability to load vehicles, and achieve low cost, easy loading, and high mechanical precision. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
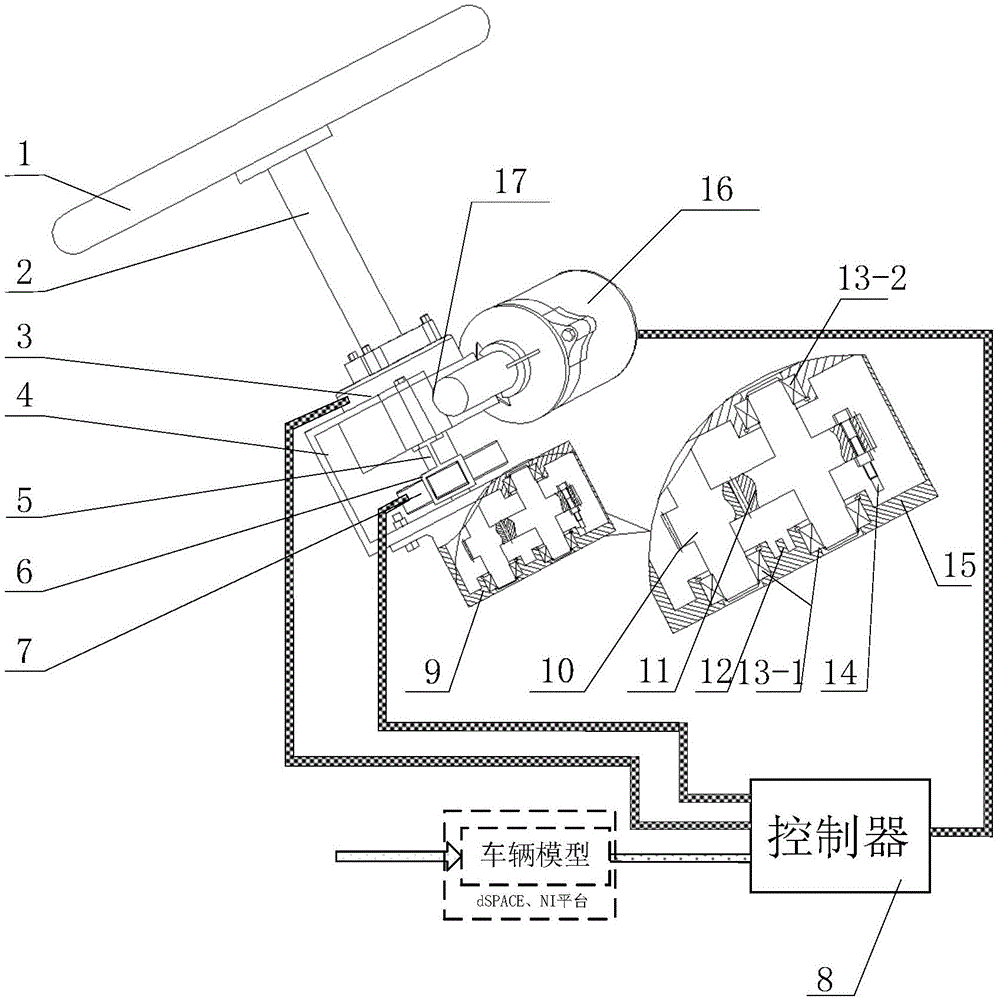
[0028] Such as figure 1 , Figure 4 , Figure 5 As shown, the present invention includes a steering wheel 1, a servo motor 16, a worm gear reduction mechanism 17, a limit device 9, a torque sensor 3, and a steering wheel angle sensor 7. The steering wheel angle sensor 7 is connected by the inner spline of the connecting shaft 5 and the outer spline of the end of the steering column tube 19, the axial fixation of the steering wheel angle sensor 7 is fixed by the sensor support 6, the wire harness square outlet of the steering wheel angle sensor 7 and The sensor support 6 cooperates and is tensioned with the screw 21. At the same time, it is fixed on the C-EPS shell with the screw 21. By connecting the shaft 5 and the sensor support 6, the sensor and the steering column tube maintain high-precision coaxiality.
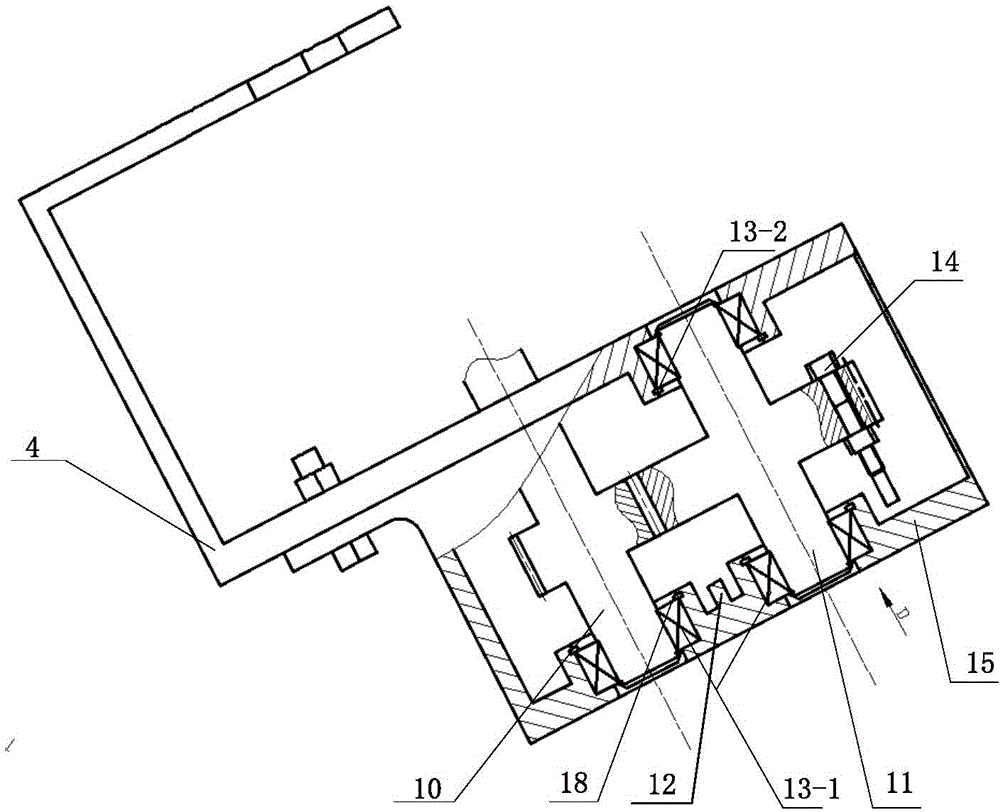
[0029] Such as figure 2 , i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More