

Indoor localization method based on foot inertia sensor
An inertial sensor and indoor positioning technology, which is applied in the direction of instruments, special data processing applications, measuring devices, etc., can solve the drift problem that cannot be solved, it is difficult to meet real-time positioning, and the positioning accuracy is not high.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
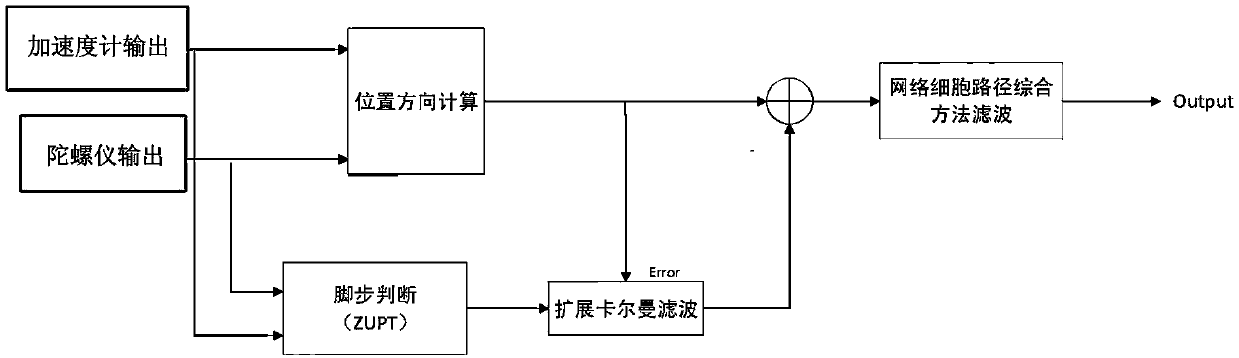
[0067] Such as figure 1 , 2 As shown, a kind of indoor positioning method based on foot inertial sensor of the present invention, specifically comprises the following steps:
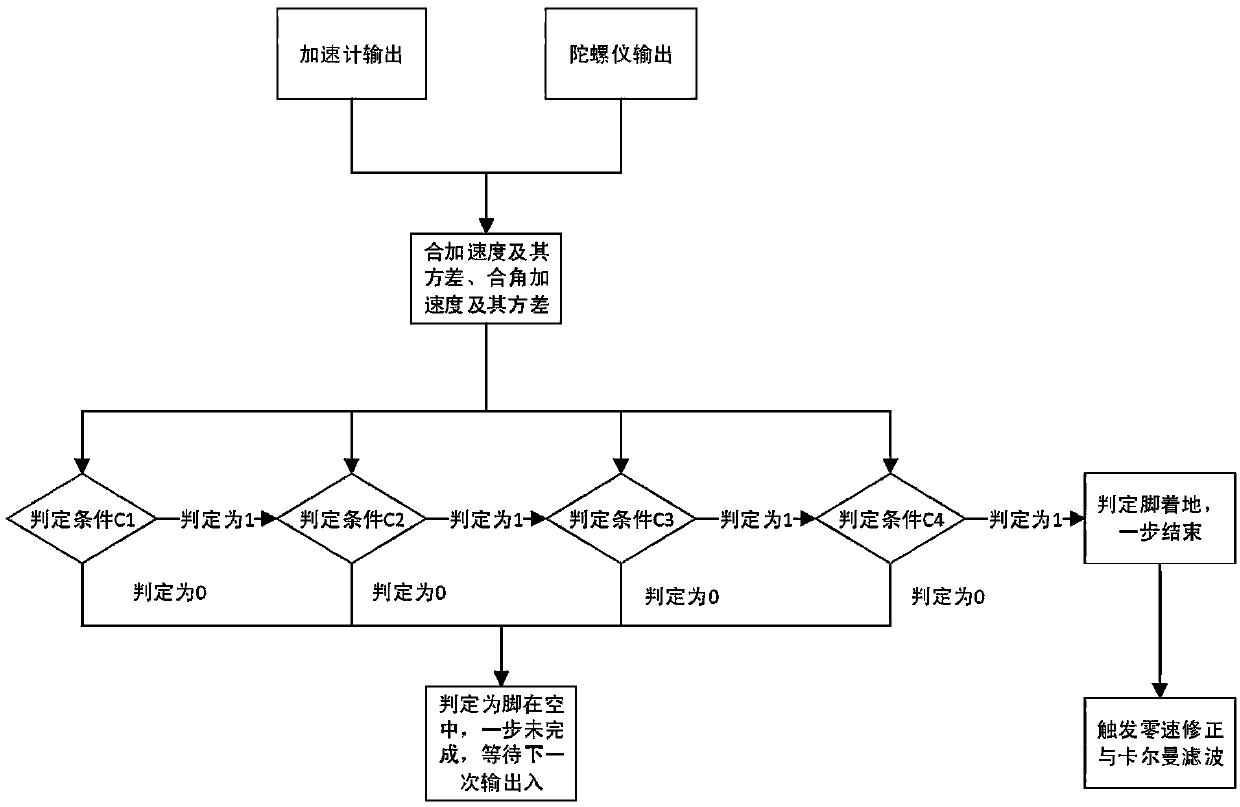
[0068] Step 1. Collect the data of accelerometer (acceleration sensor or direction sensor) and gyroscope in real time to obtain pedestrian walking direction information and count steps:
[0069] (1) Initial alignment at the beginning of walking, determine the starting point of positioning, and determine the initial yaw angle through the initial data of the gyroscope;
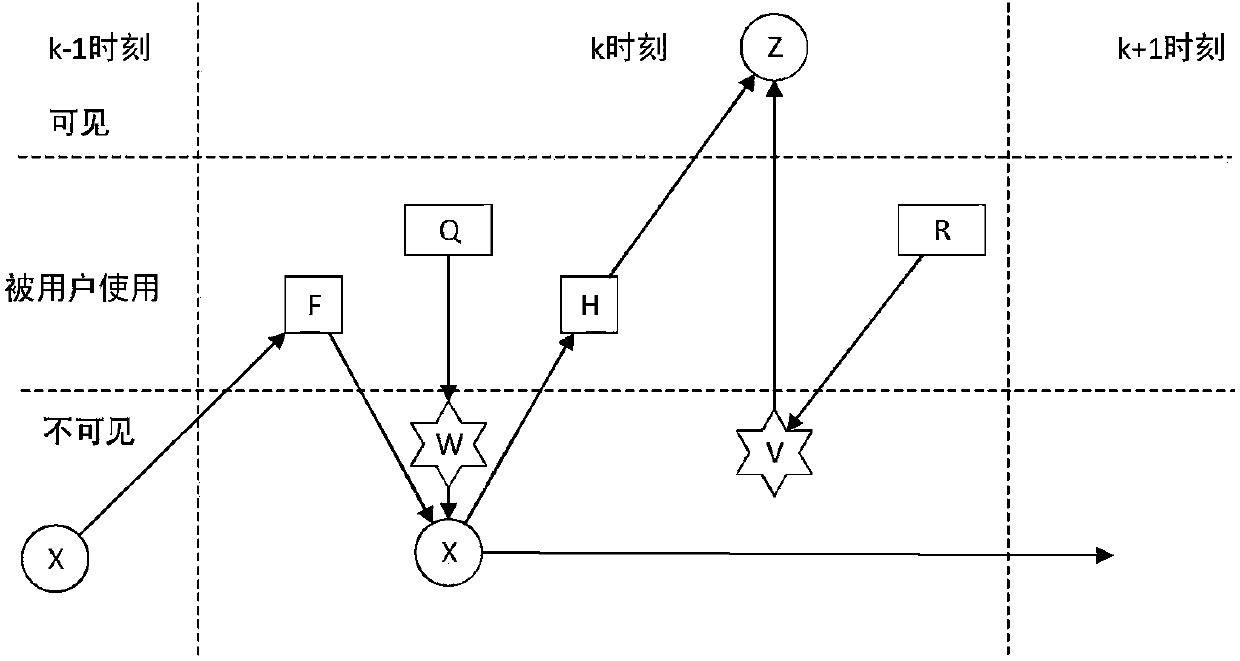
[0070] (2) After the coordinate transformation of the acceleration and angular velocity output by the accelerometer and gyroscope, the state variable as the original positioning information of time k is obtained through integration respectively Include location information (x k the y k z k ), velocity information (v xk v yk v zk ) and attitude matrix (roll k pith k heading k );
[0071] (3) Use the output data of the acc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More