

Robot for lower limb joint rehabilitation training
A rehabilitation robot and joint technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve the problems of mechanical legs prone to tremors and movement gaps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Hereinafter, embodiments of the present invention will be described with reference to the drawings.
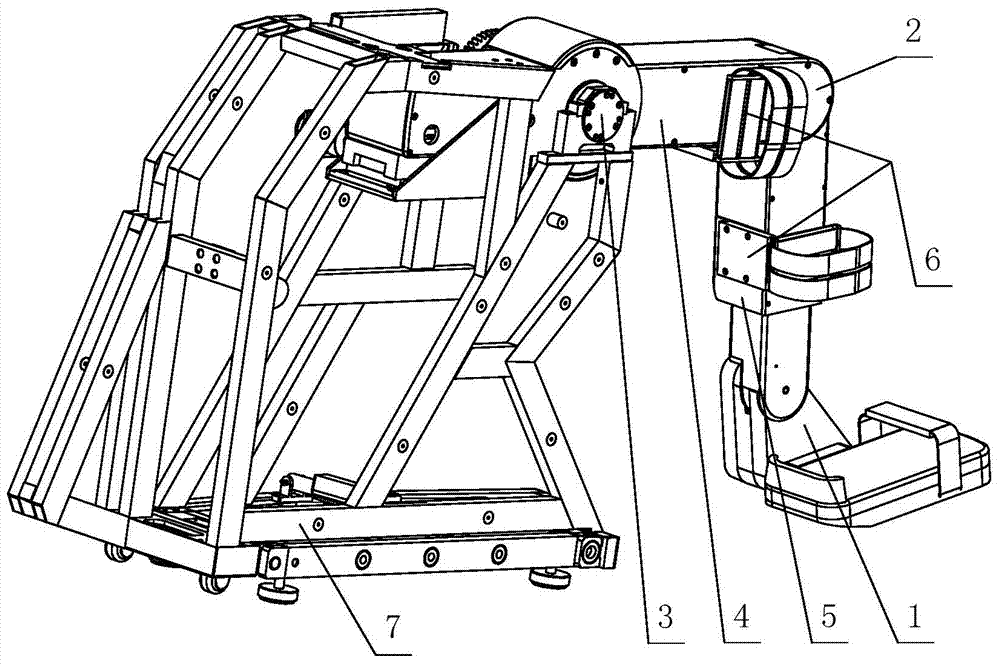
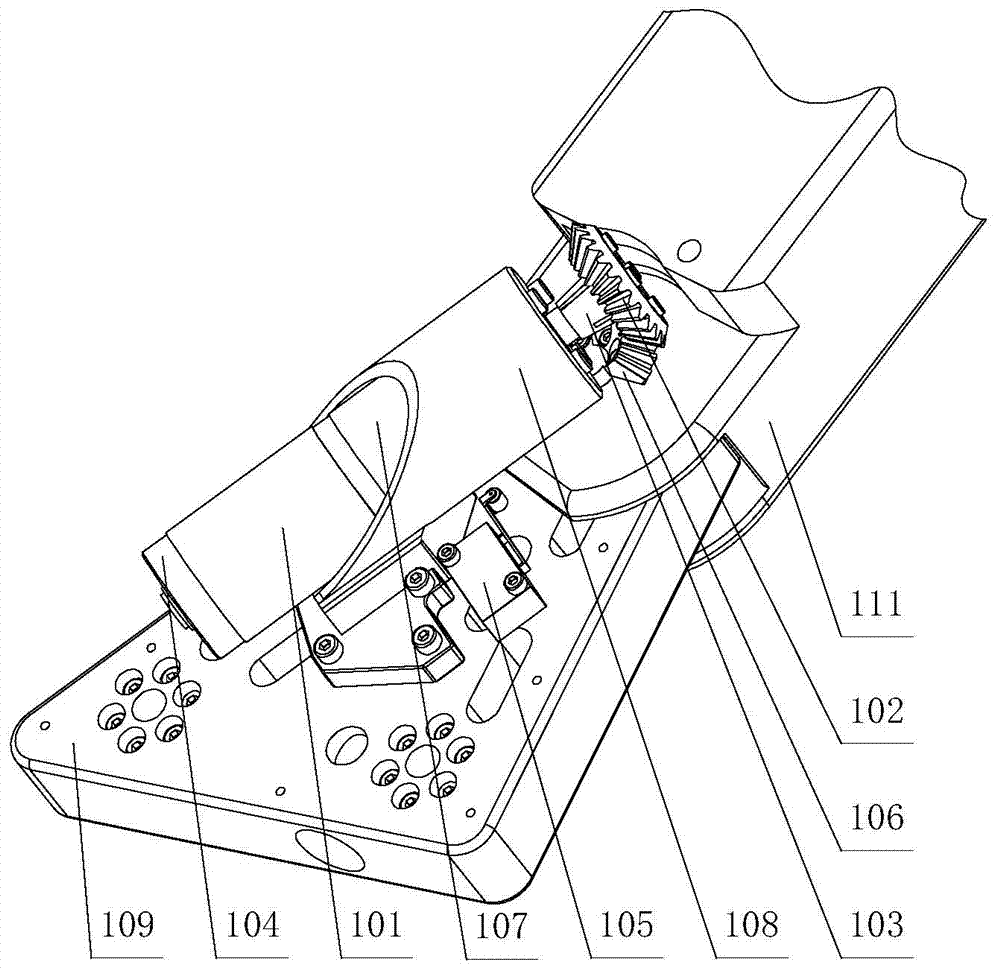
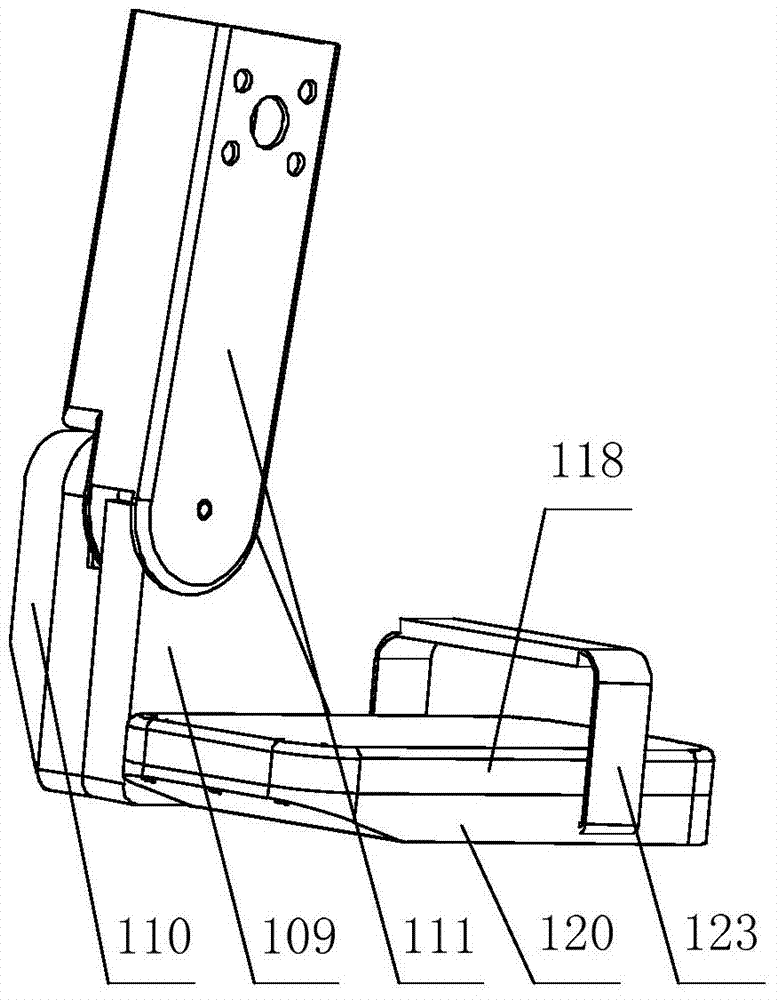
[0032] The lower limb joint rehabilitation training robot of the present invention has three degrees of freedom, including an ankle joint device 1, a knee joint device 2, a hip joint device 3, a mechanical leg thigh adjustment device 4, a mechanical leg calf adjustment device 5, a leg motion prediction device 6 and Rack 7 (see figure 1 ), among them, the ankle joint adopts the design scheme of direct motor drive and bevel gear transmission, which has a compact and simple structure; Frame 7 reduces the weight of the moving part of the mechanical leg; the power assembly of the knee joint is placed behind the hip joint as a whole to balance the weight of the moving part of the mechanical leg and realizes a lightweight design; the mechanical leg thigh adjustment device 4 and The shank adjustment device 5 adopts the swing push rod slider mechanism ( Figure 5c ), which can...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More