A precision macro-motion parallel positioning system and method in a micro-nano operating environment
A technology of operating environment and positioning system, applied in the fields of precision manufacturing, precision measurement, and precision positioning, can solve the problems such as the assembly error of the branch chain of the parallel mechanism, the decrease in stiffness and load-bearing capacity, and the influence of the positioning accuracy of the mechanism, and achieve the elimination of rotating joints. The effect of gap, fast response, and guaranteed accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
[0075] In the accompanying drawings of the manual:
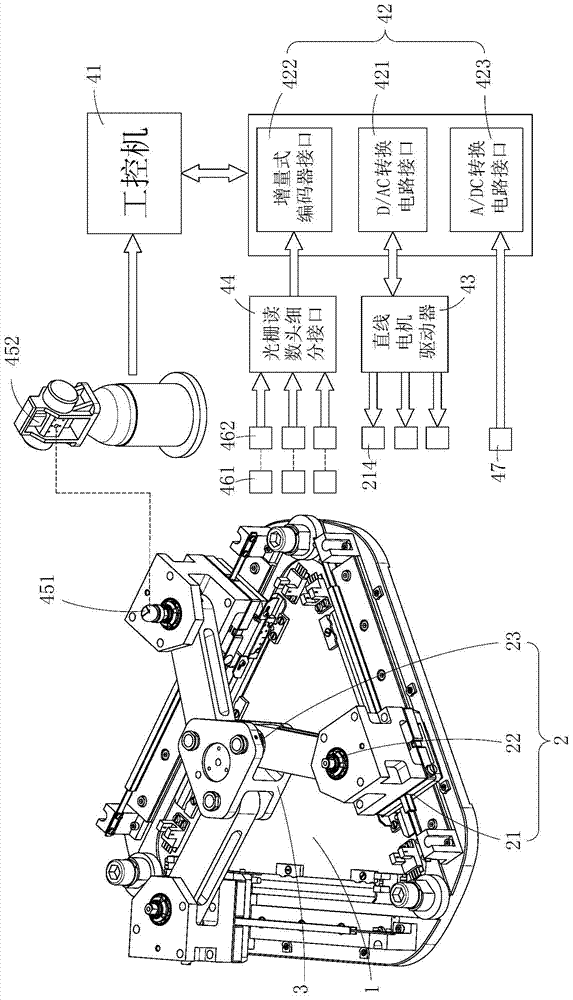
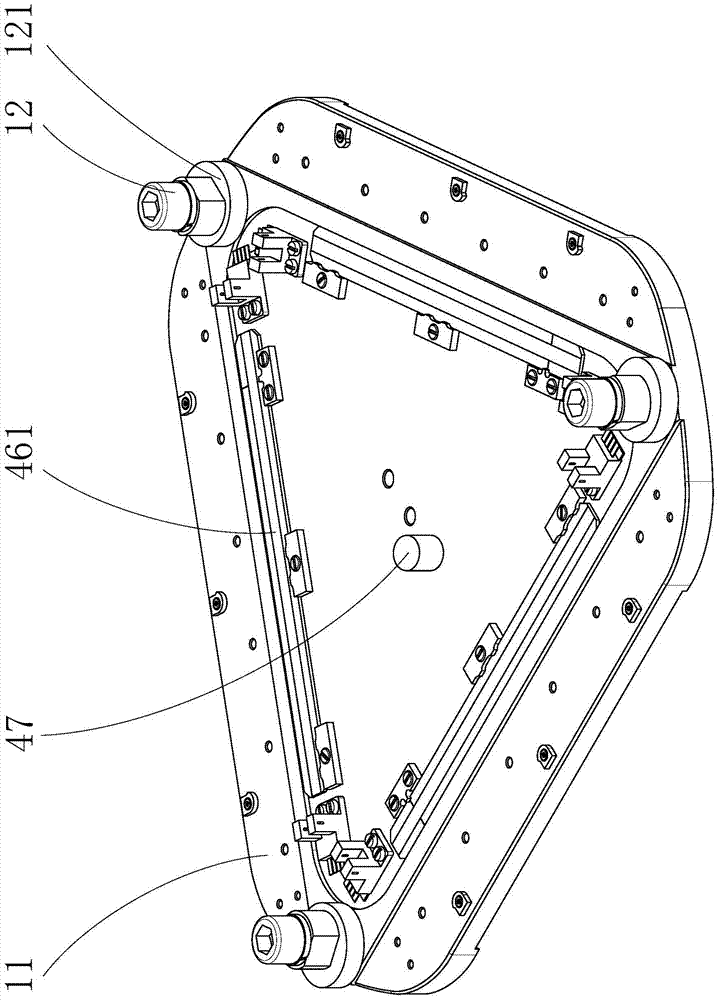
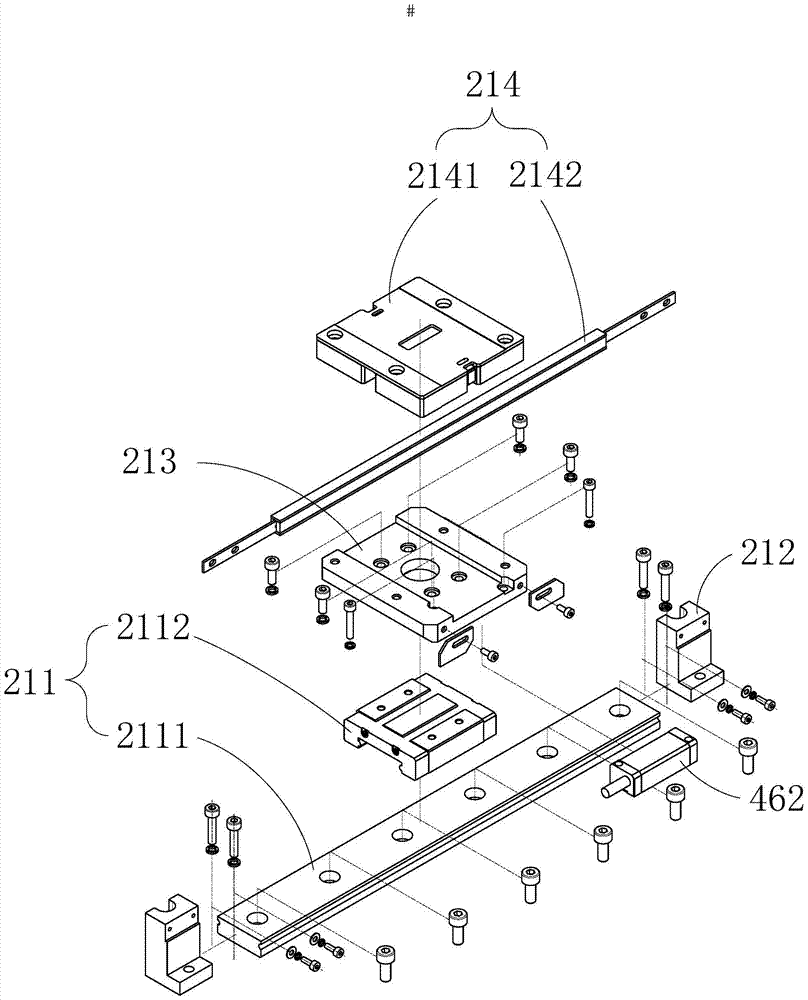
[0076] 1-base; 11-bottom plate; 12-eccentric wheel clamping mechanism; 121-eccentric wheel column; 2-ultrasonic motor drive branch chain; 21-active moving auxiliary joint; block; 212-motor fixing bracket; 213-connecting plate; 214-linear ultrasonic motor; 2141-substrate; 2142-guide rod; Bearing Ⅰ; 224-precision bearing Ⅱ; 225-lock nut Ⅰ; 226-elastic deformation parts; ;234-rotating shaft II; 235-end cover; 236-lock nut II; 3-moving platform; 41-industrial computer; 42-controller; 421-D / AC conversion circuit; 422-incremental encoder interface; 423-A / DC conversion circuit; 43-linear motor driver; 44-subdivision interface of grating reading head; 451-laser reflection ball; 452-laser tracker; 461-indium steel grating rul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More