

Lightweight design method of leg structure of biped humanoid robot
A lightweight design, robot technology, applied in the field of robots, can solve the problems of difficult debugging and control, high quality, short operation time, etc., to reduce power, increase power supply time, and avoid interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Further describe the present invention below in conjunction with embodiment and accompanying drawing thereof:
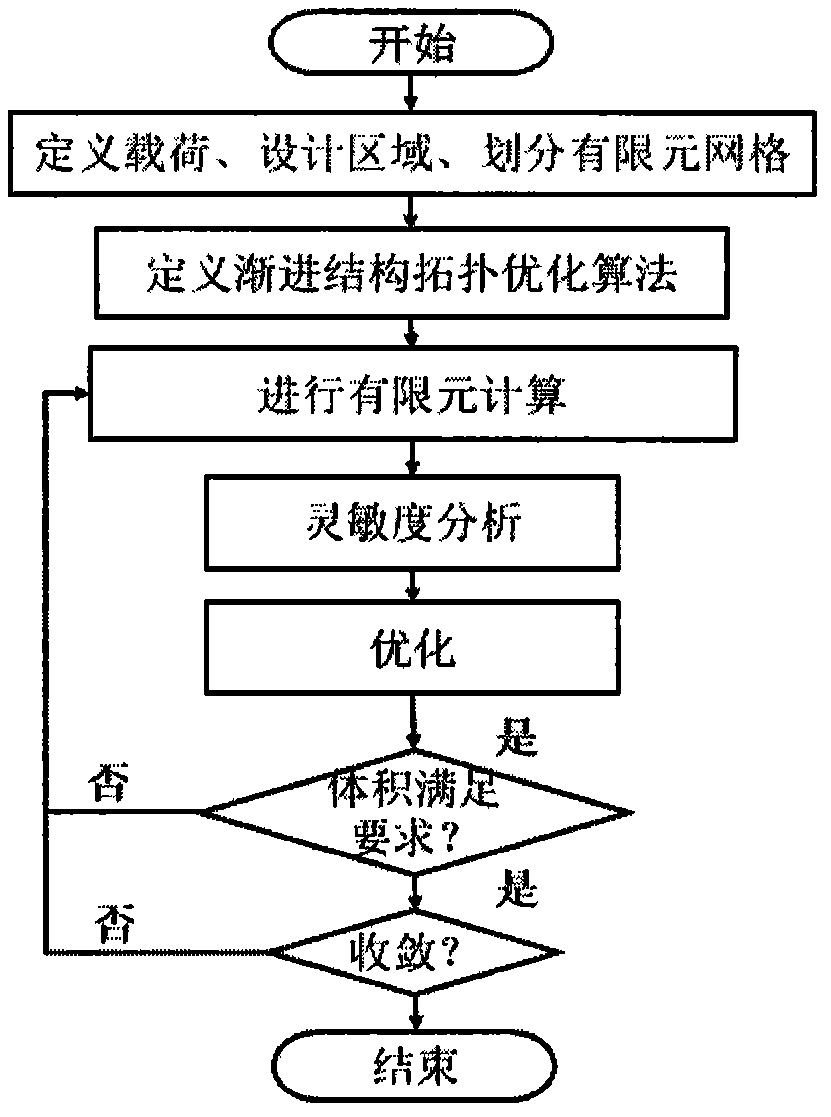
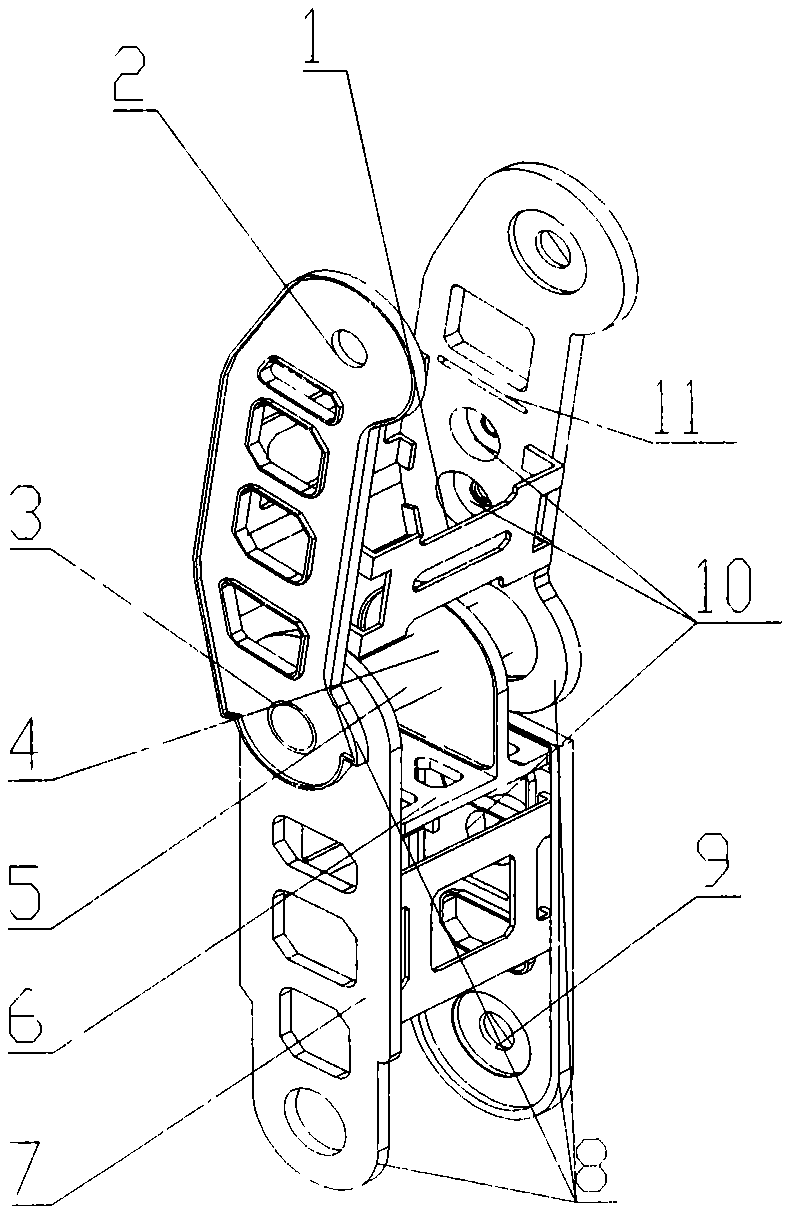
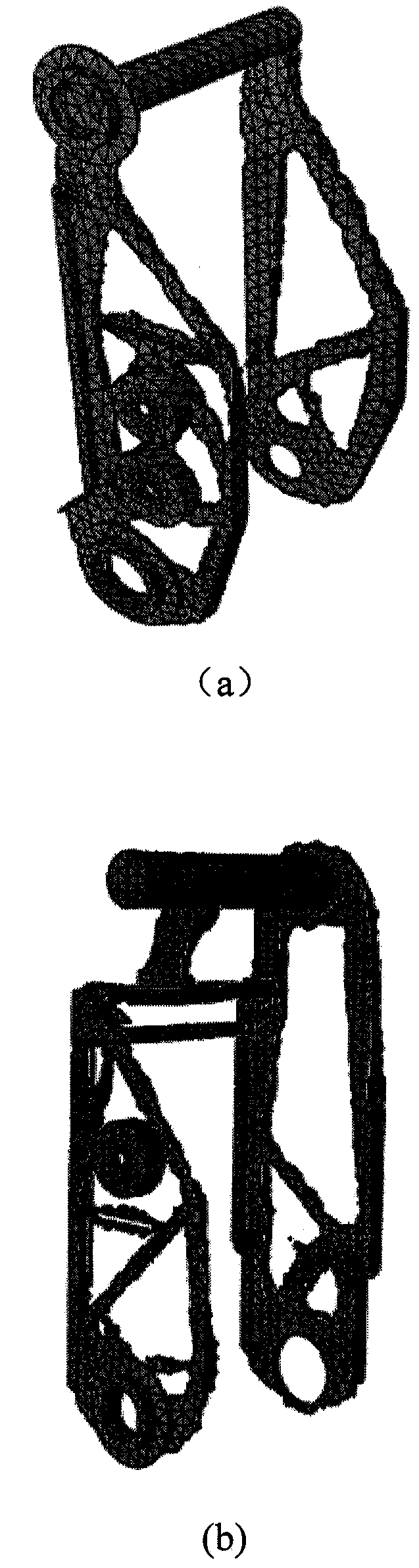
[0021] Such as Figure 1 to Figure 4 As shown in the present invention, a lightweight design method for the leg structure of a biped humanoid robot, under the condition of not changing the motor, driver and other components, carries out load constraints according to the actual force situation, and the legs of the biped humanoid robot Topology optimization is performed on the internal structure to reduce the profile and weight of the robot's legs.
[0022] The material grade used for the leg structure of the biped humanoid robot of the present invention is aluminum alloy 7075-T651, and the material properties are: mass density is 2810kg / m3, elastic modulus is 72Gpa, Poisson's ratio is 0.33, and yield strength is 505Mpa. Due to the limitation of processing conditions, the thickness of the component is not changed due to the compression deformation of the compon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More