

Gaussian particle filter hardware implementation method based on FPGA
A Gaussian particle filter, hardware-implemented technology, applied in the field of nonlinear system filtering and electronics, can solve problems such as insufficient depth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
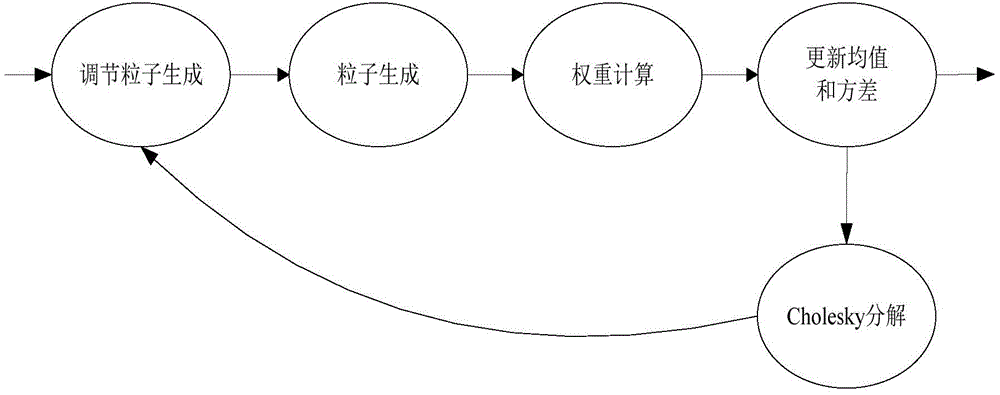
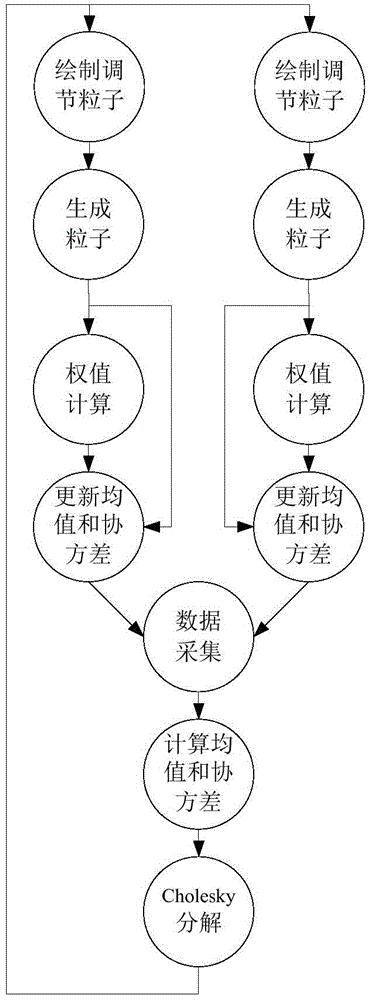
[0025] figure 1 Shown is the data flow diagram of GPF, according to the data flow diagram, the present invention designs each processing module of GPF, including particle generation module PG, particle update module PU, mean value calculation / generation output module MC / OG, resampling module RS, etc. ,Such as figure 1 Shown is the data flow diagram of GPF.
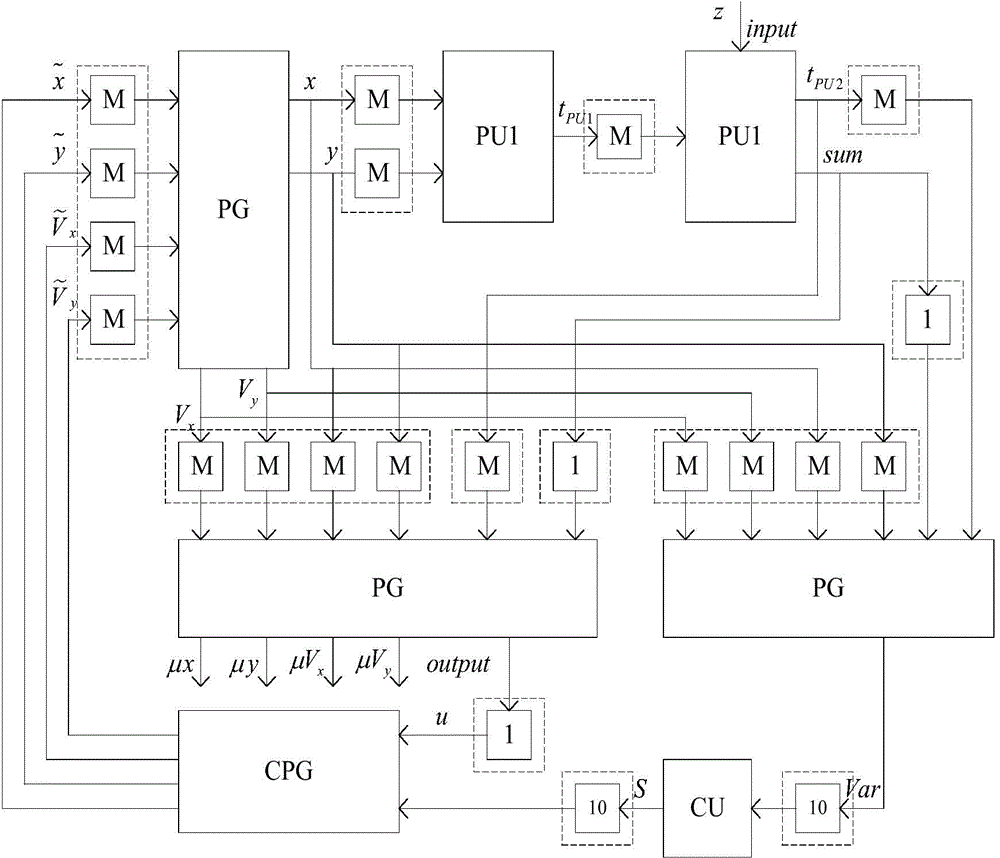
[0026] Particle generation module PG: In the particle generation module PG, there are four connection input vectors buffer and 4 concatenated output vectors (x, V x ,y,V y ) buffer. The input vectors stored in the input buffer are generated by the resampling module RS. In subsequent iterations, the output of the particle generation module PG is used again in the resampling module RS. In addition, there are two other (x, y) buffers that are used for the PU1 processing module. All input and output are M-dimensional vectors.
[0027] In the arithmetic operation step of particle generation, the output is calculated by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More