

Visual intelligent numerical control system and visual measuring method thereof
A numerical control system and visual intelligence technology, applied in manipulators, manufacturing tools, etc., to achieve the effect of reducing integrated development costs and solving cost problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0036] The specific implementation manner of the present invention will be further described below in conjunction with the accompanying drawings.
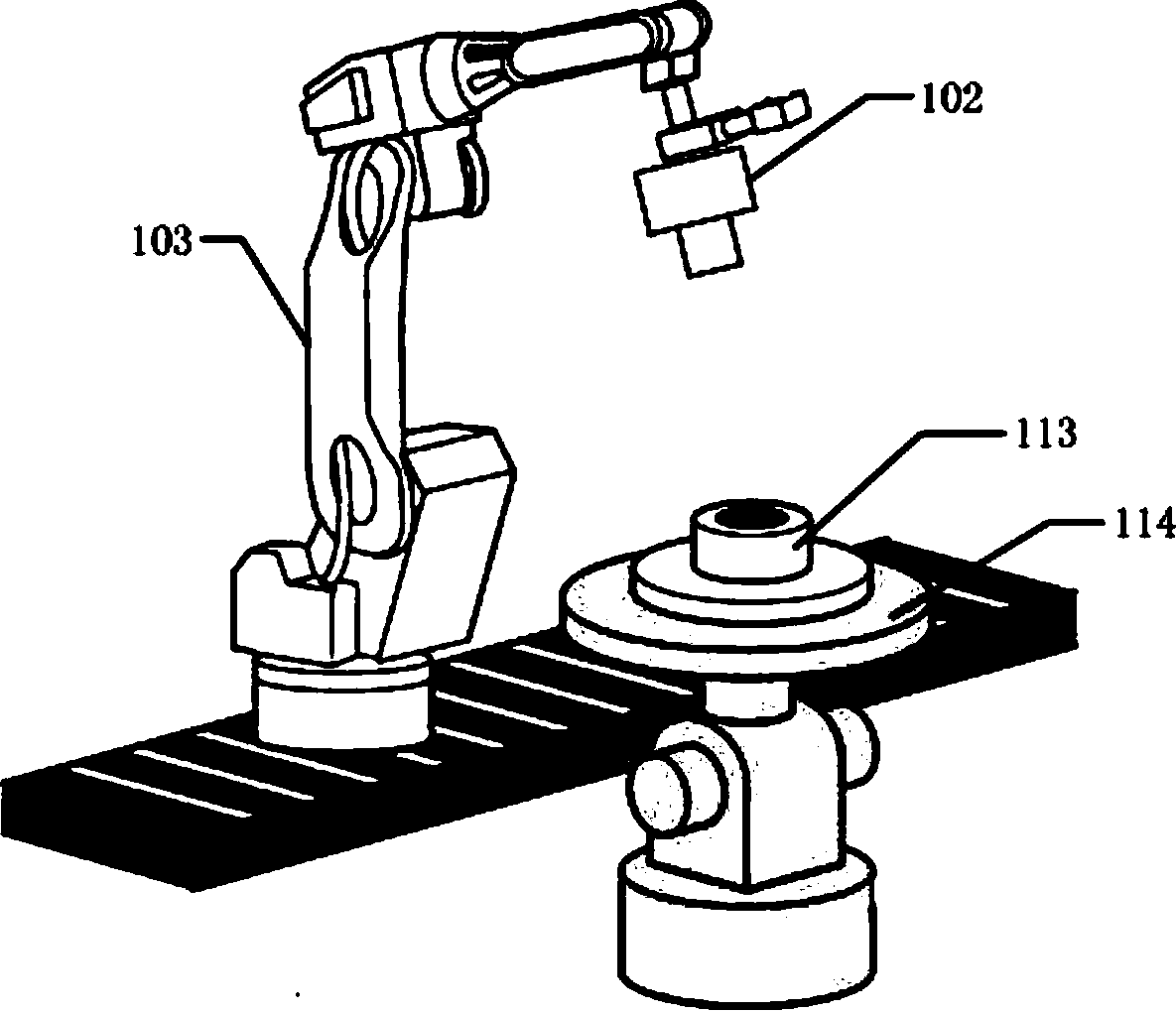
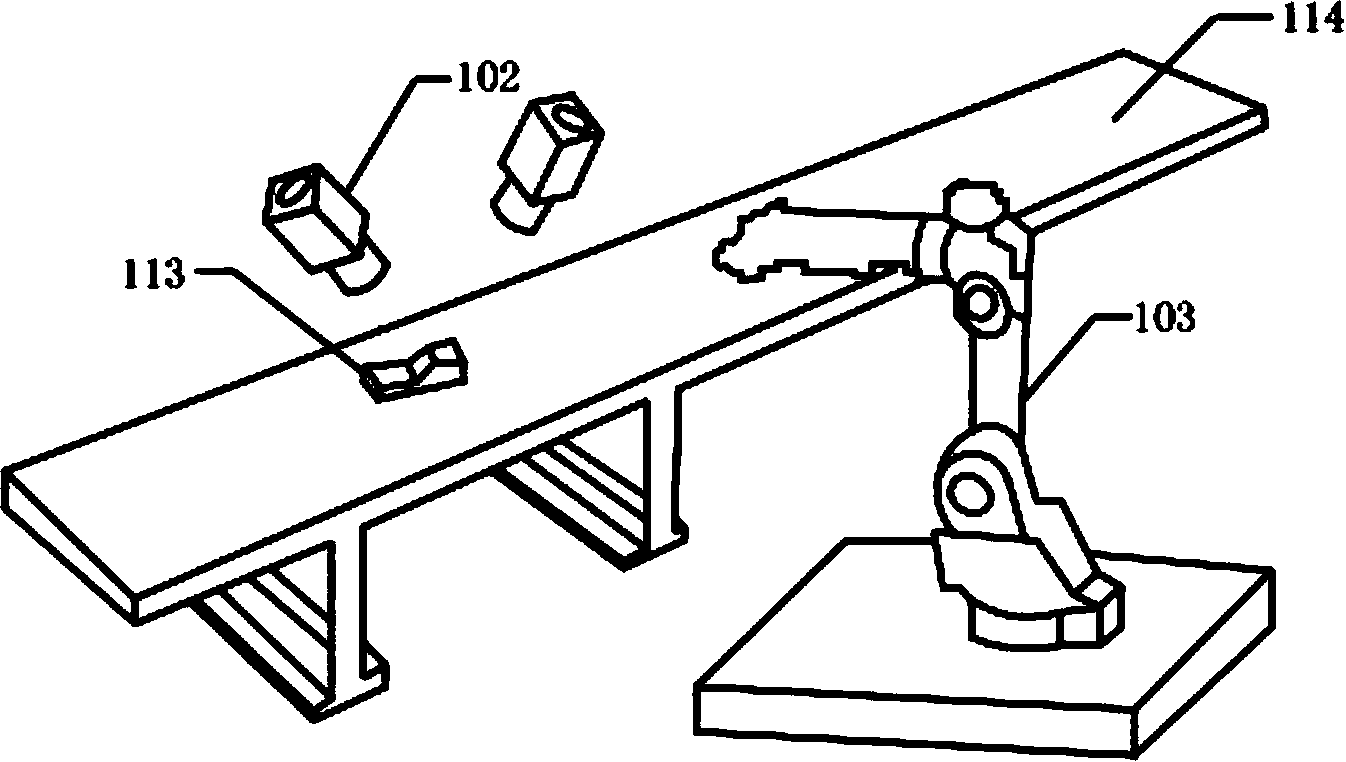
[0037] The visual intelligent numerical control system of the present invention is configured on the robot to form a visual intelligent robot, which is used for positioning and sorting in the field of electronic manufacturing. The implementation form adopts two kinds of hand-eye installation and fixed camera position installation, and the following two implementations are respectively implemented form is described.
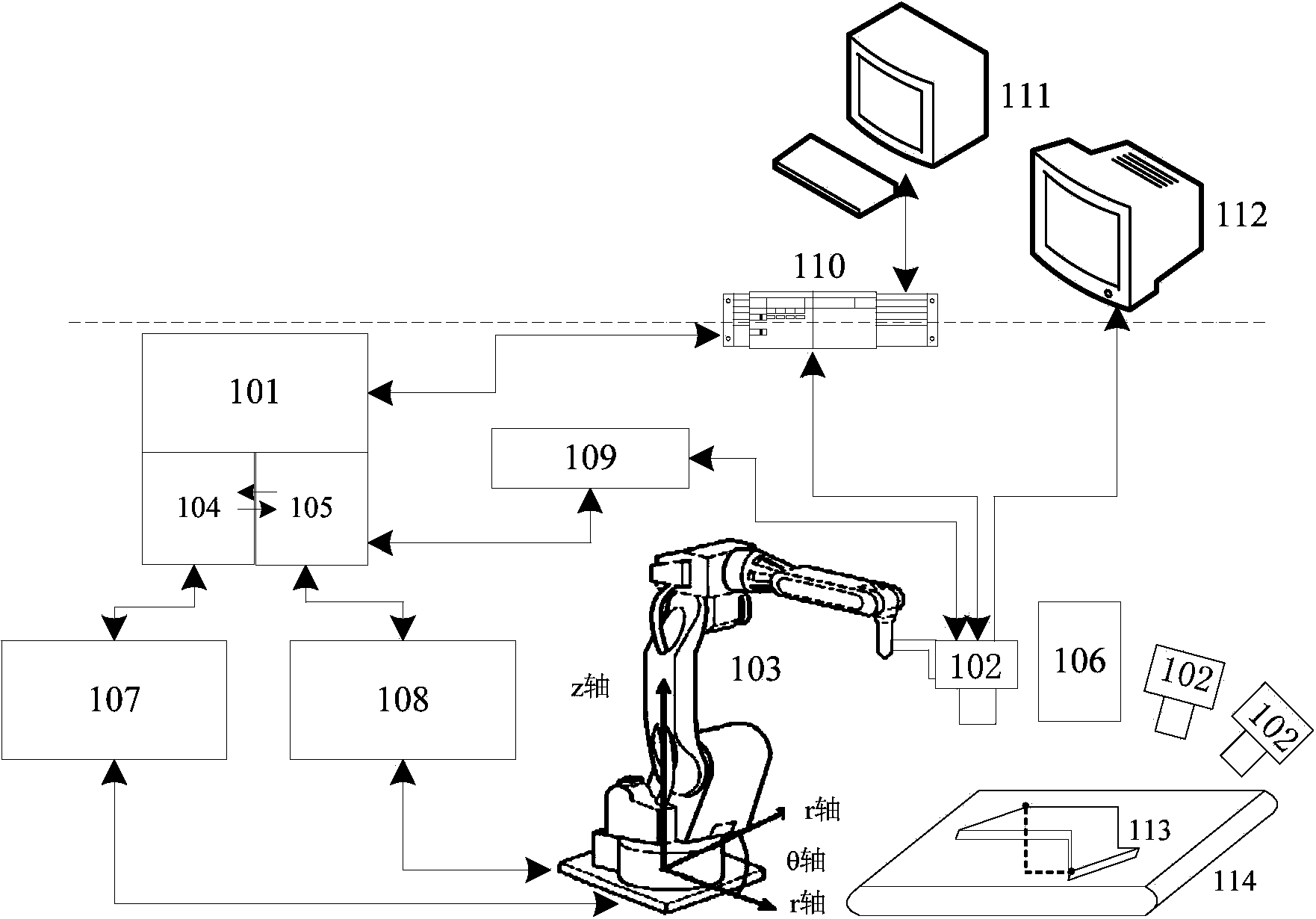
[0038] The visual intelligent robot used in the electronics manufacturing industry adopts a visual intelligent numerical control system, which has an open numerical control subsystem and a machine vision subsystem, which can complete the control of the robot, the measurement of the target workpiece, the positioning of the mark point, and the calculation and positioning of the coordinate system.
[0039] like figure 1A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More