

Position error compensation method for distance recognition superfluous kinematics parameter-based robot
A technology of kinematic parameters and error compensation, applied in the direction of instruments, manipulators, electrical digital data processing, etc., can solve problems such as loss, achieve the effect of improving accuracy, significant compensation effect, and reducing standard deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
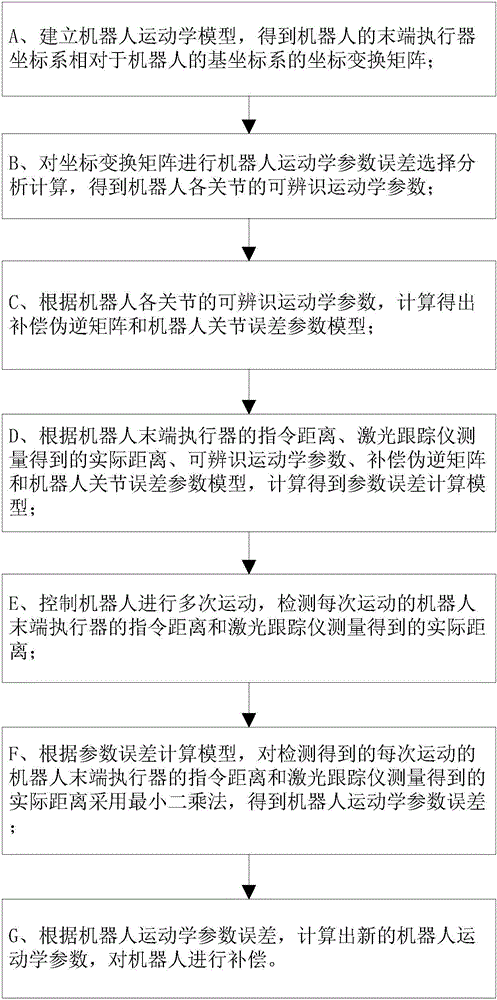
[0030] reference Figure 1-Figure 2 , The robot position error compensation method based on the distance recognition redundant kinematics parameter of the present invention includes the following steps:
[0031] A. Establish the robot kinematics model, and obtain the coordinate transformation matrix of the robot's end effector coordinate system relative to the robot's base coordinate system;
[0032] B. Perform robot kinematics parameter error selection analysis and calculation on the coordinate transformation matrix, and obtain the identifiable kinematics parameters of each joint of the robot;
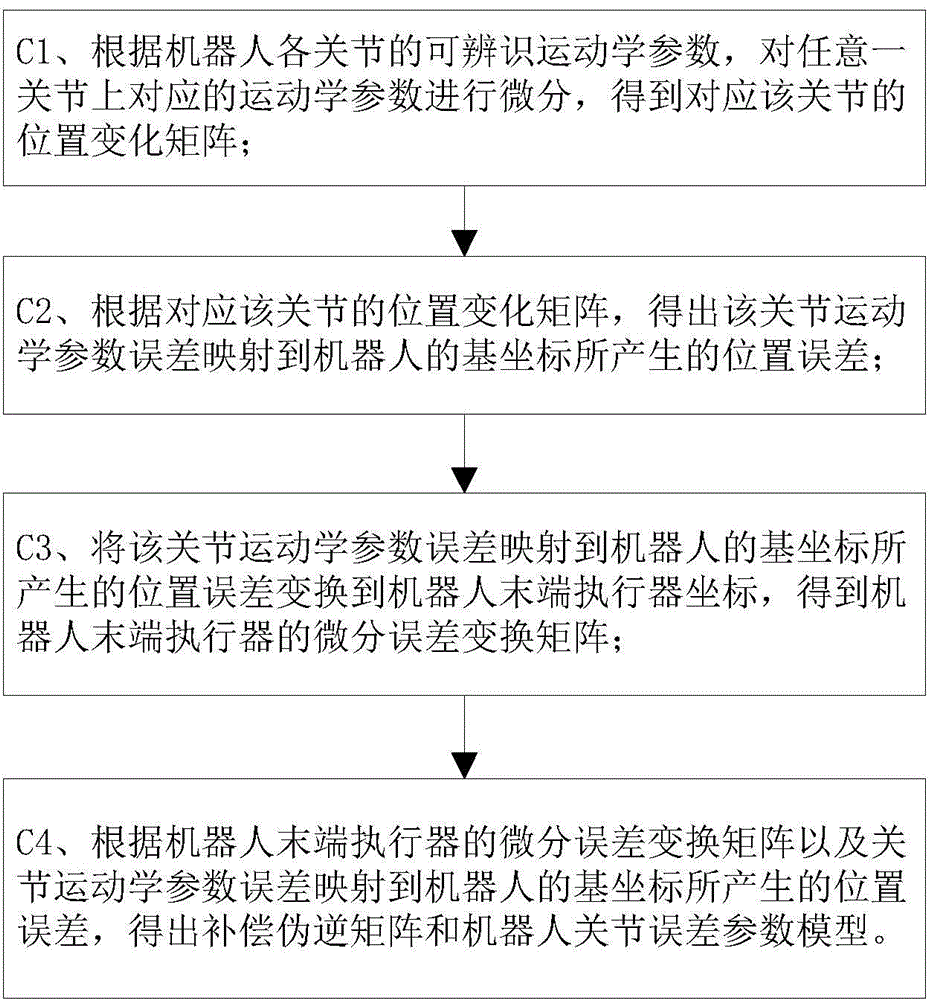
[0033] C. According to the identifiable kinematic parameters of each joint of the robot, the compensation pseudo-inverse matrix and the robot joint error parameter model are calculated;
[0034] D. According to the command distance of the robot end effector, the actual distance measured by the laser tracker, the identifiable kinematic parameters, the compensation pseudo-inverse matrix and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More