

Robot Position Error Compensation Method Based on Distance Identification of Redundant Kinematic Parameters
A kinematic parameter, robot technology, applied in manipulators, complex mathematical operations, program-controlled manipulators, etc., can solve problems such as loss, and achieve the effect of improving accuracy, reducing the amount of calculation, and achieving significant compensation effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
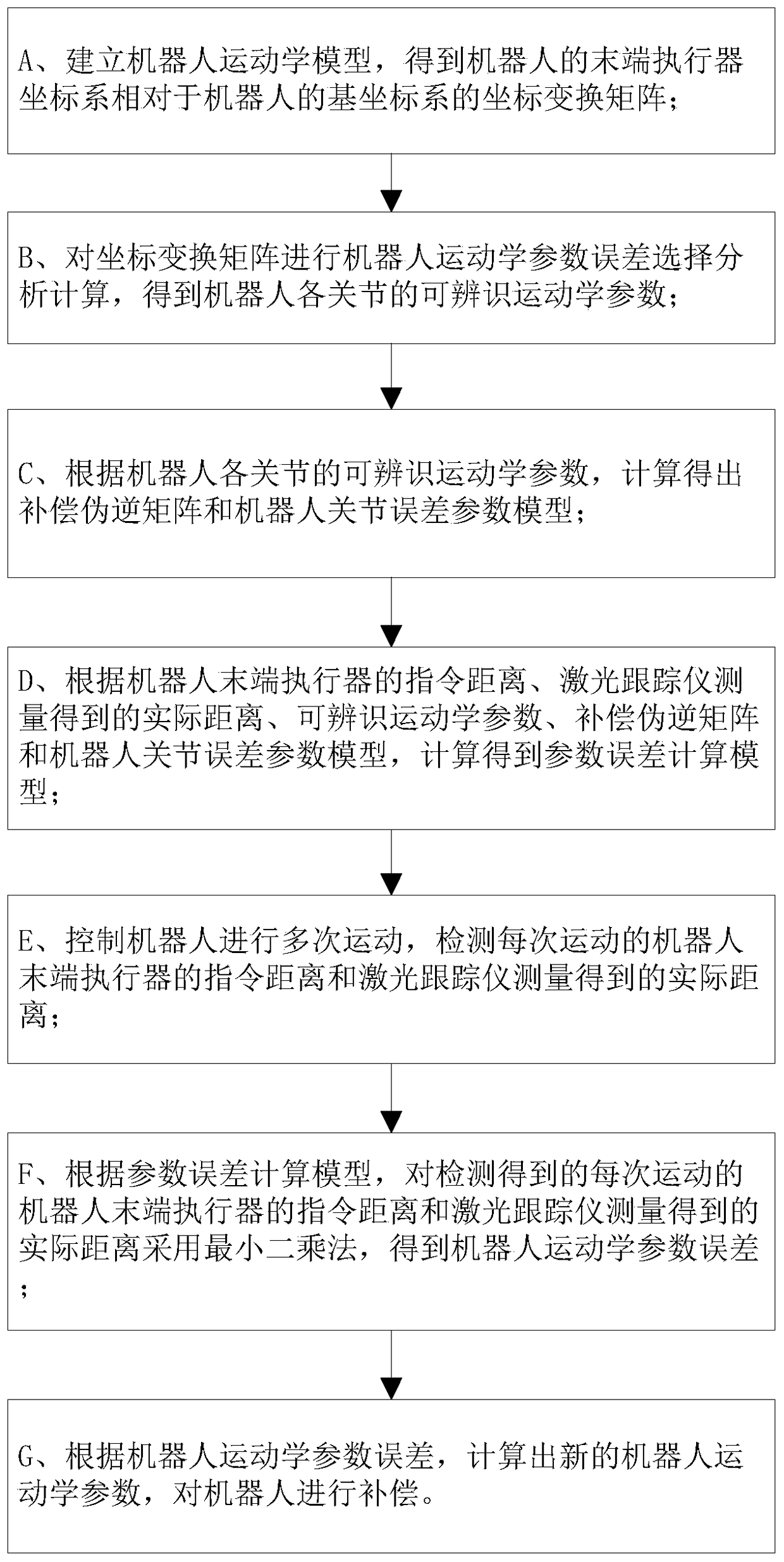
[0030] reference Figure 1-Figure 2 , The robot position error compensation method based on the distance recognition redundant kinematics parameter of the present invention includes the following steps:
[0031] A. Establish the robot kinematics model, and obtain the coordinate transformation matrix of the robot's end effector coordinate system relative to the robot's base coordinate system;
[0032] B. Perform robot kinematics parameter error selection analysis and calculation on the coordinate transformation matrix, and obtain the identifiable kinematics parameters of each joint of the robot;
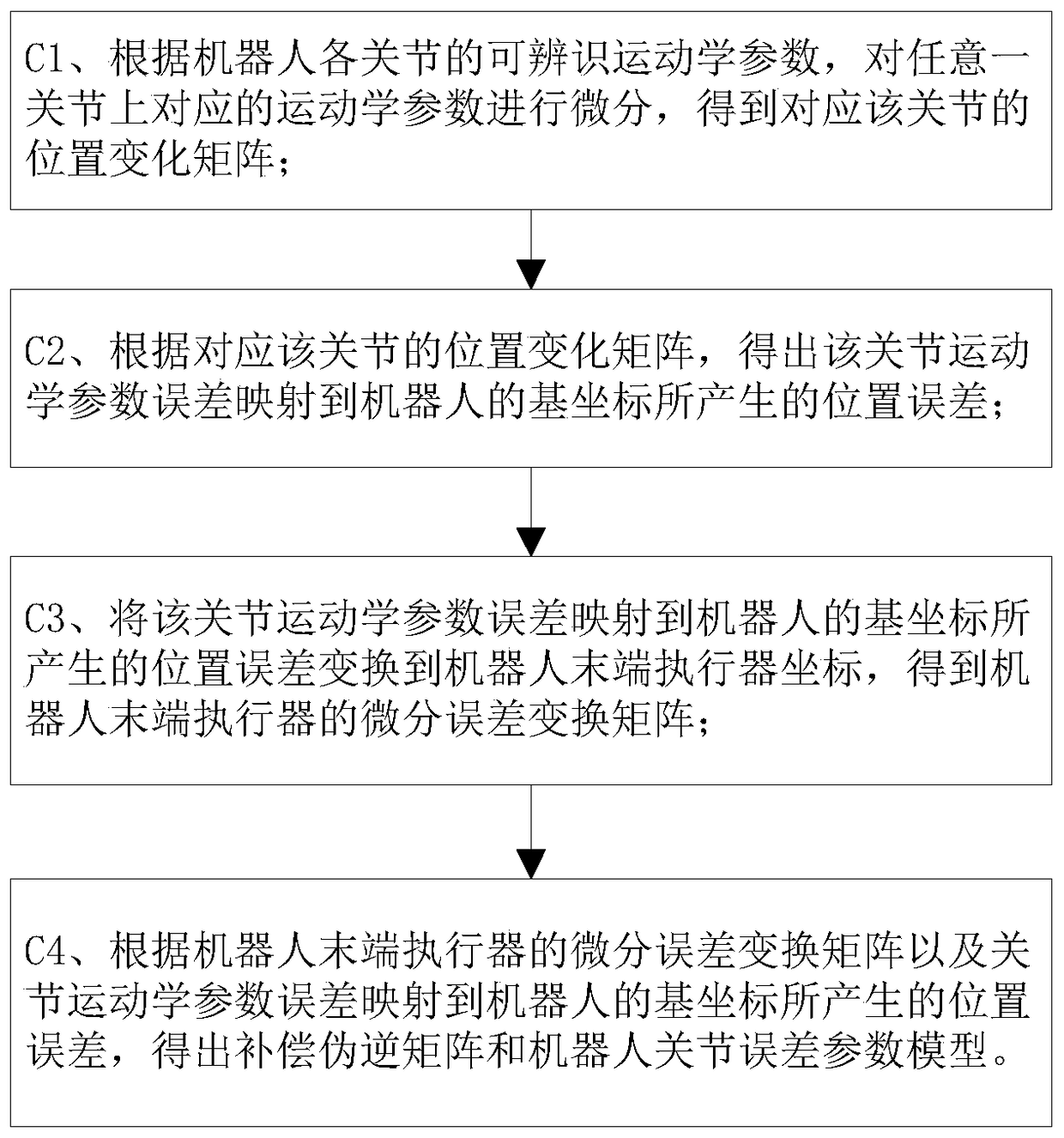
[0033] C. According to the identifiable kinematic parameters of each joint of the robot, the compensation pseudo-inverse matrix and the robot joint error parameter model are calculated;
[0034] D. According to the command distance of the robot end effector, the actual distance measured by the laser tracker, the identifiable kinematic parameters, the compensation pseudo-inverse matrix and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More