

Low-energy-loss six-foot robot
A hexapod robot, low energy consumption technology, used in motor vehicles, transportation and packaging, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The technical solution of the present invention will be further specifically described below through specific embodiments in conjunction with the accompanying drawings.
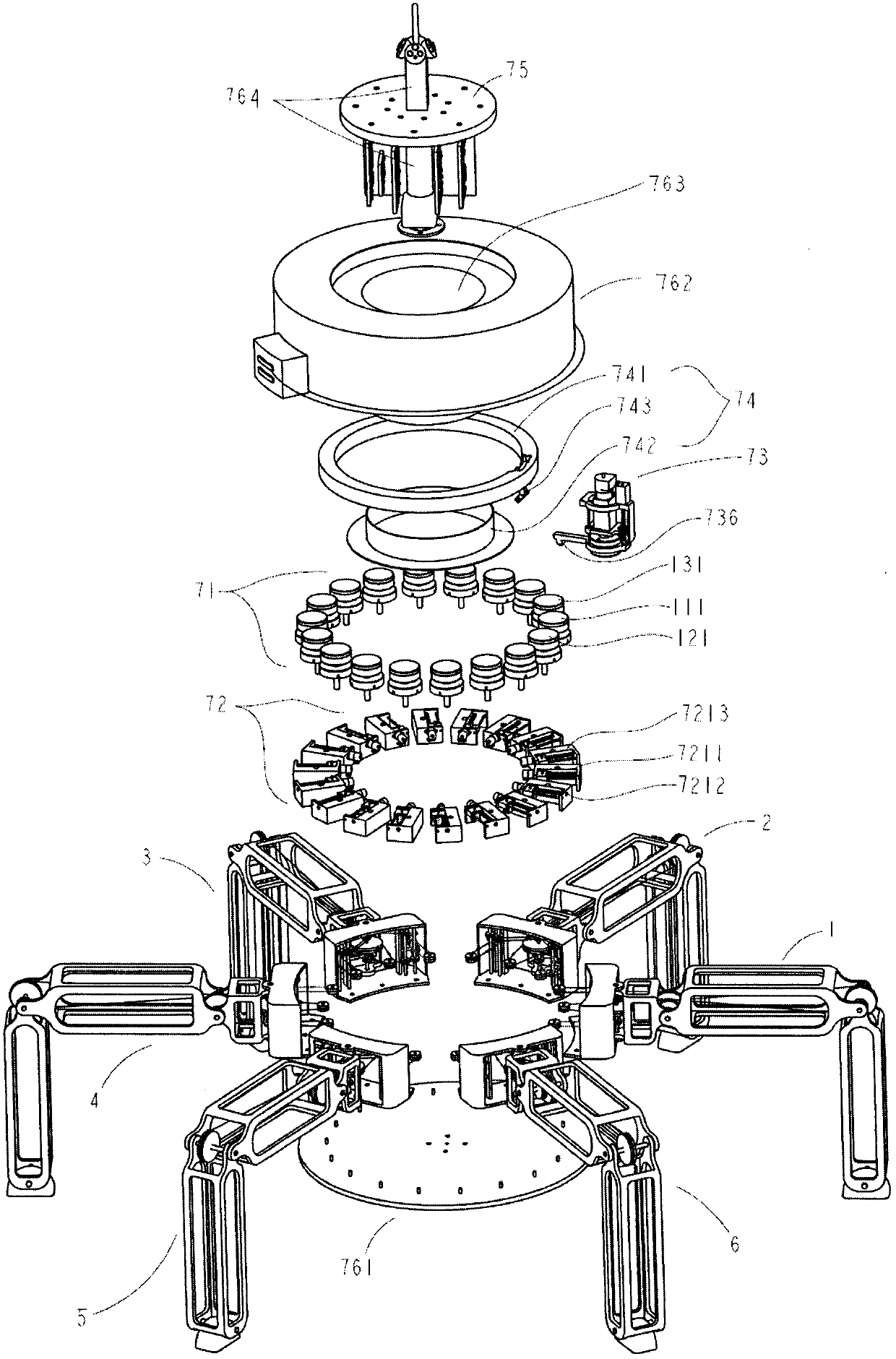
[0067] Embodiment: described low energy consumption hexapod robot such as figure 1 As shown, it includes 6 legs 1-6 and a body 7, each leg has 3 single-degree-of-freedom motion joints, and the foot of each leg is connected to the end leg joint through a spherical hinge; the whole robot has 18 active motion joints (Controlled degrees of freedom), whose main feature is to use 1 driver to control all 18 degrees of freedom, and complete each leg swing and posture adjustment (posture adjustment) movement in various gaits in a step-by-step motion manner.
[0068] 1. Leg structure of low energy consumption hexapod robot
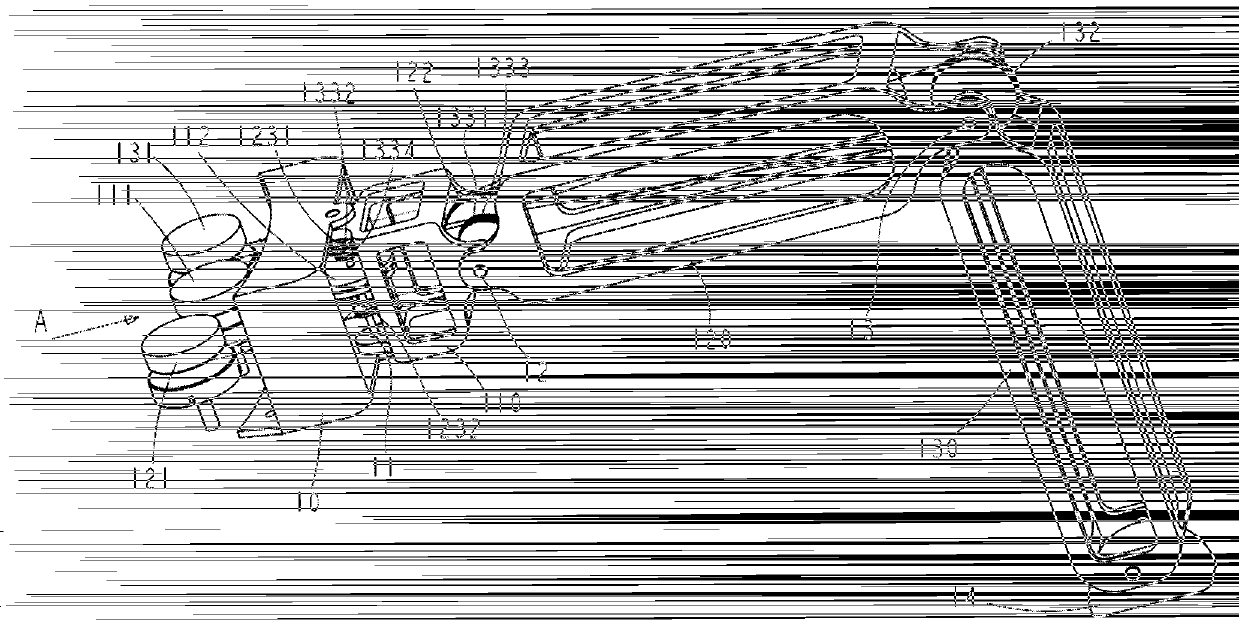
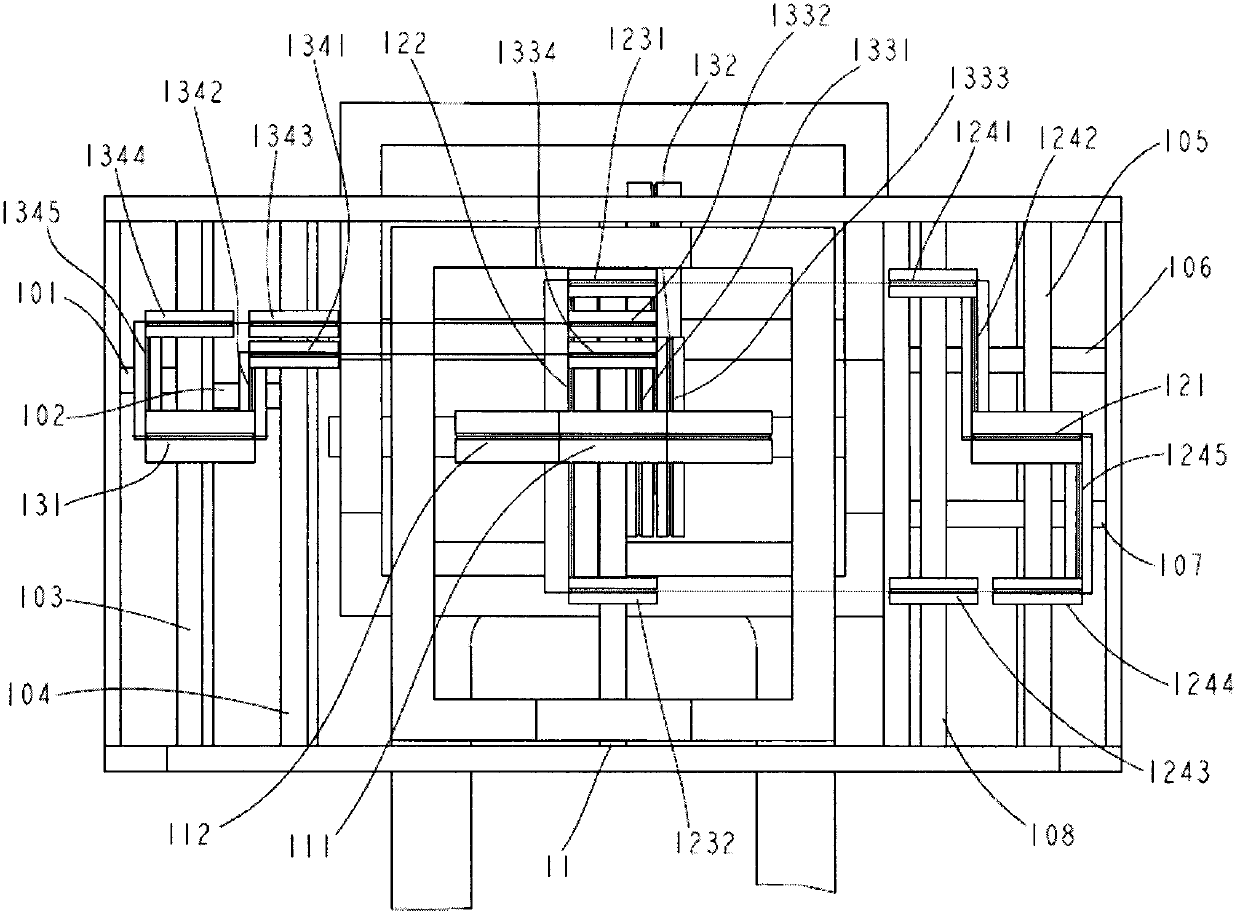
[0069] Legs 1 to 6 have the same structure, and the transmission system of each active joint of the leg will be described in detail by taking leg 1 as an example. Such as figure 2 As sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More