

A Robust Detection Method of 3D Wheel Alignment Parameters Based on Machine Vision
A four-wheel alignment parameter and machine vision technology, applied in wheel testing, instrumentation, image data processing, etc., can solve problems such as tire wear, seldom mentioning the car body coordinate system, and difficult high-precision measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] Now the specific embodiment of the present invention is described as follows.
[0072] The present invention selects a common typical case and optional wheel (left rear wheel), is described in detail as follows in conjunction with accompanying drawing:
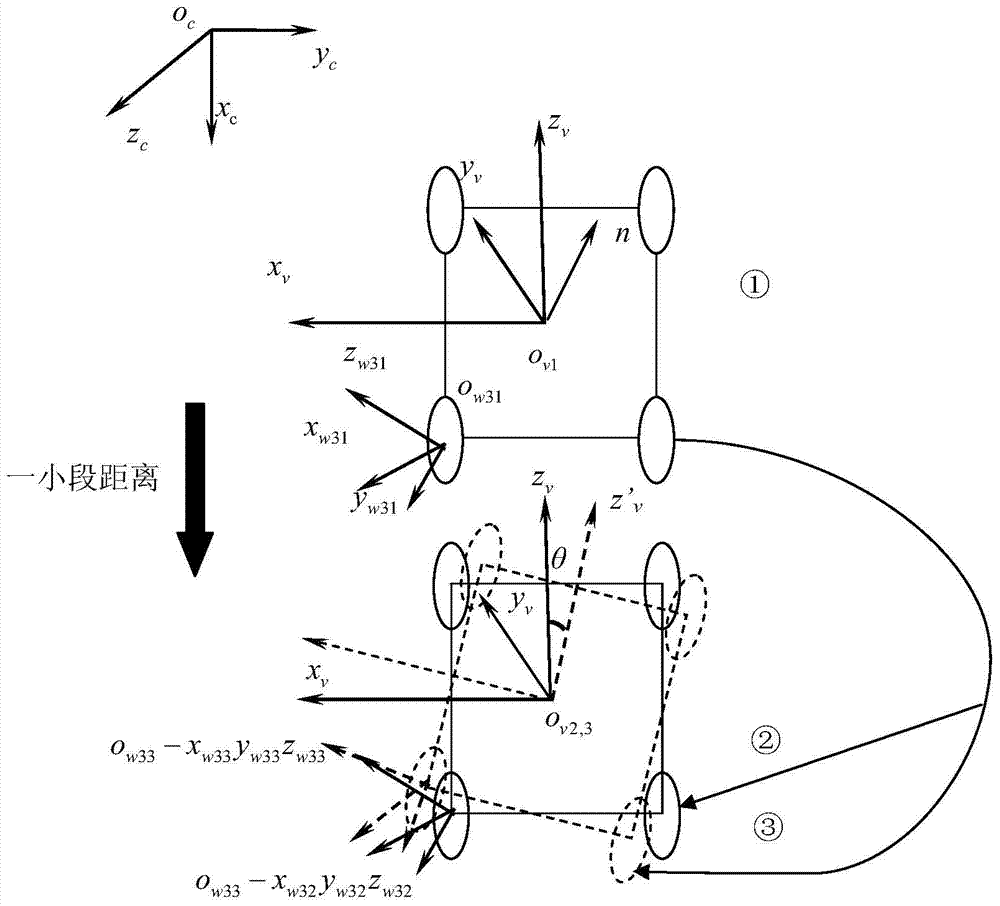
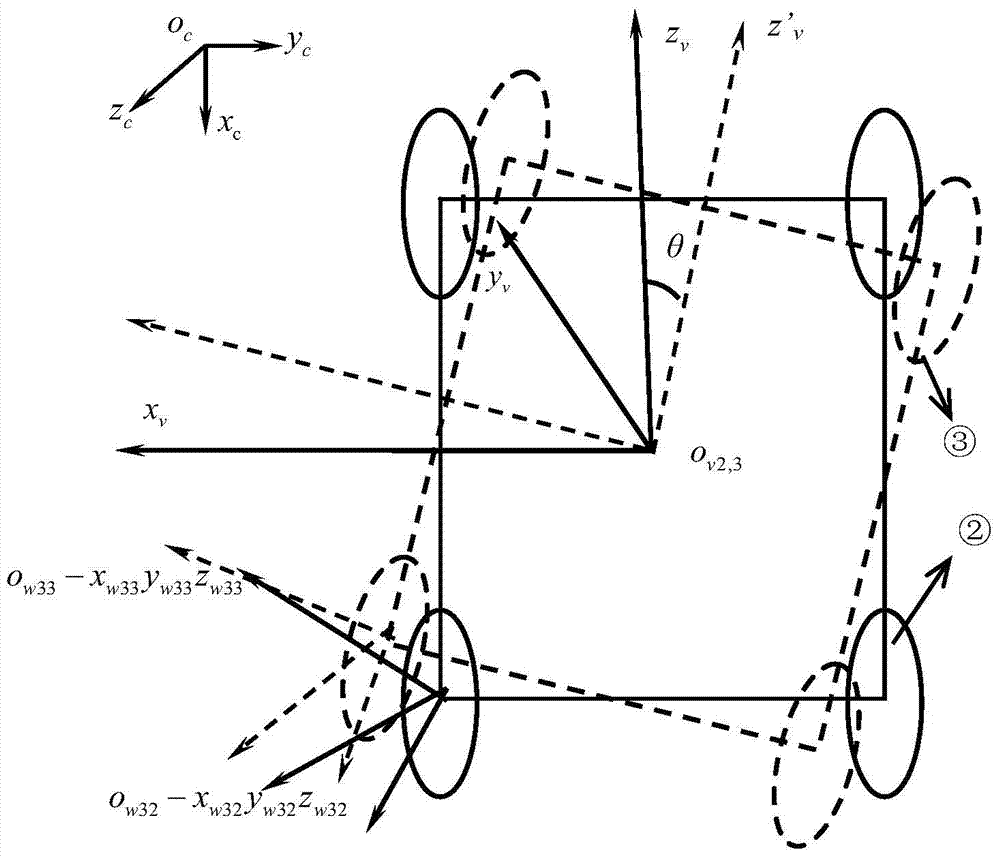
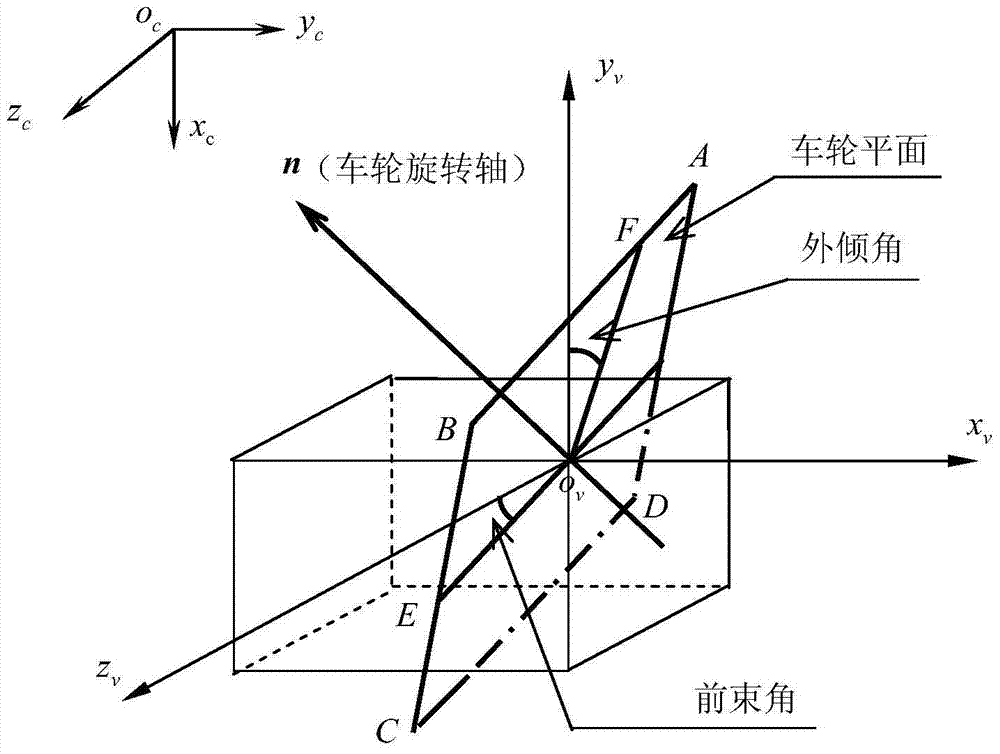
[0073] see Figure 1~3 , the present invention is a kind of automobile 3D four-wheel alignment parameter detection method based on machine vision, and concrete steps and formula are described in detail as follows:
[0074] 1. During a short period of forward and backward movement of the car, use the calibrated camera to take pictures, and obtain the homogeneous matrix corresponding to the pose relationship between the camera and the calibration plate fixed on the wheel hub c h wij . in, c h wij Indicates the pose homogeneous matrix of the i-th calibration board relative to the camera coordinate system for the jth time, that is, the pose homogeneous matrix of the i-th wheel relative to the camera coordinate system f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More