

A dynamic surface control method and controller without speed feedback of a steering gear pan/tilt
A dynamic surface control and speedless technology, applied in the direction of using feedback control, etc., can solve the problems of increasing the size and weight of the pan/tilt, increasing the tracking adjustment time, reducing the reliability of the system, etc., achieving light weight, small size, The effect of high-precision angle control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention is described in detail below in conjunction with accompanying drawing:
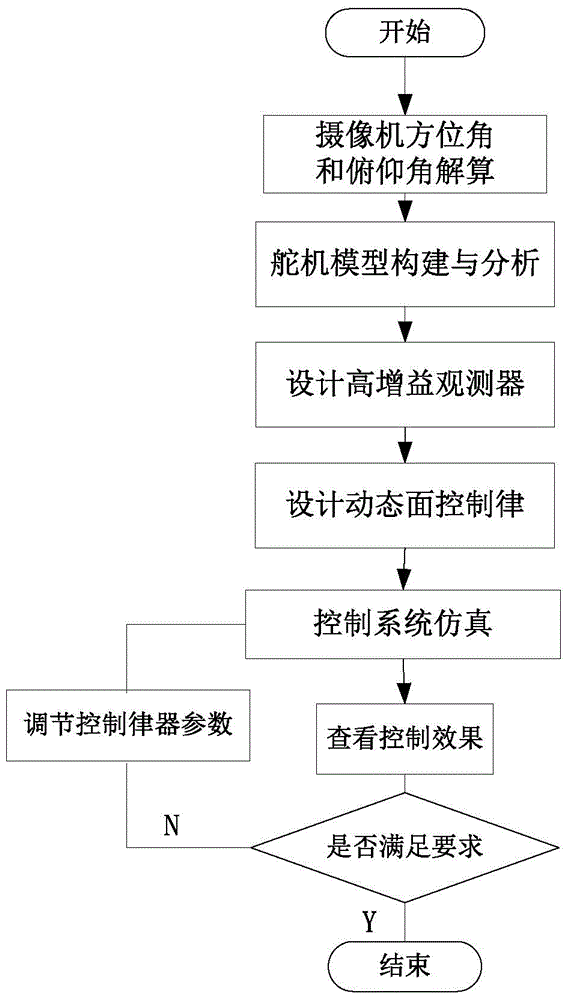
[0036] Such as figure 1 As shown, a dynamic surface control method without speed feedback of a steering gear gimbal, comprising the following steps:
[0037] Step 1: Calculation of camera azimuth and pitch angle
[0038] The coordinates in the inertial system of the monitoring target point and the UAV or ground robot equipped with the steering gear pan / tilt are obtained by infrared sensors (indoor) or GPS (outdoor). 1 =[x 1 ,y 1 ,z 1 ] T and P 2 =[x 2 ,y 2 ,z 2 ] T , then the optical axis vector coordinate of the camera pointing to the target point is P e for:
[0039] P e =P 1 -P 2 (1)
[0040] Then the coordinates of the optical axis vector in the mobile robot body coordinate system are
[0041] P b =RP e =[x c ,y c ,z c ] T (2)
[0042] Here R represents the Rodrigues rotation matrix, which is defined as follows:
[0043] R ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More