

Pneumatic muscle based intelligent wearable lower limb
A pneumatic muscle and lower limb technology, applied in the field of rehabilitation systems, can solve the problems of bulkiness, thick joints, unfavorable compactness and miniaturization of robots, etc., and achieve the effect of efficient rehabilitation training.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
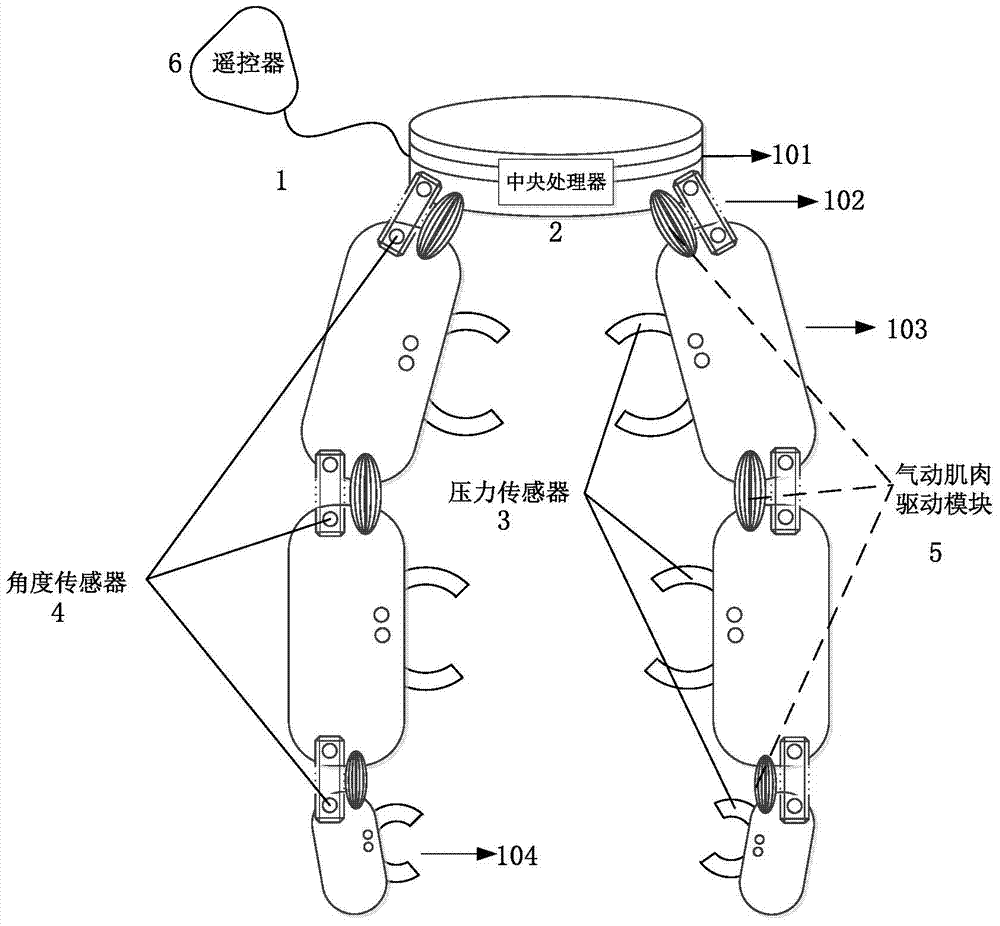
[0031] The human walking process is realized by relying on muscles and bones under the control of the nervous system. From the perspective of mechanism, the human walking process is a complex movement of a multi-degree-of-freedom space mechanism. In the present invention, after the human leg and the exoskeleton mechanical leg are connected, the exoskeleton mechanical leg imitates the gait of the human leg to drive the human leg to move.
[0032] According to the assumption of the dynamic model, both the human leg and the exoskeleton mechanical leg are considered to move on the sagittal plane, that is, the hip, knee, and ankle joints are only flexing and extending, and the actions of each joint in each movement can be decomposed , Statistics to establish a certain model. In each walk, the angle of each joint connection is within a certain range. According to the algorithm, the movement of each joint is decomposed during each walk, and the angle and strength generated during wal...
example
[0047] In this embodiment, after the patient wears the smart wearable lower limbs, the pressure sensor starts to detect the power of the patient's movement, and the angle sensor also detects the movement direction of the patient's joints and the angle θ generated by the movement. In this embodiment , The pressure sensor adopts HBM's U9B pull and pressure sensor, and the angle sensor adopts sst810 dynamic inclination sensor.
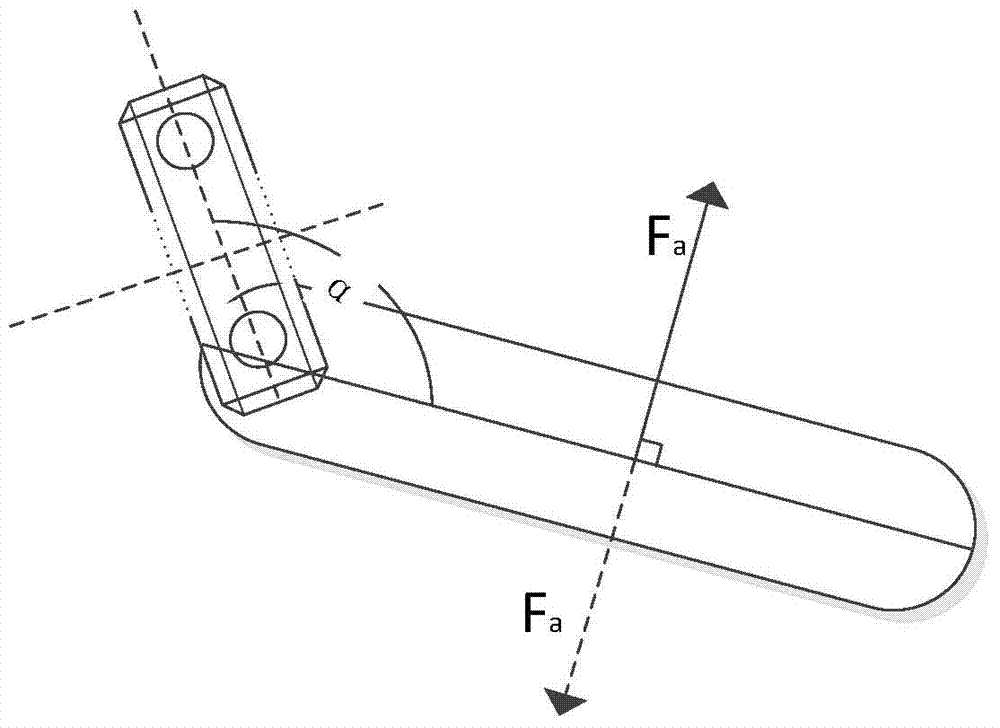
[0048] Such as figure 2 As shown, the active force F detected by the pressure sensor a Can be up or down, but always perpendicular to the fixed plate.
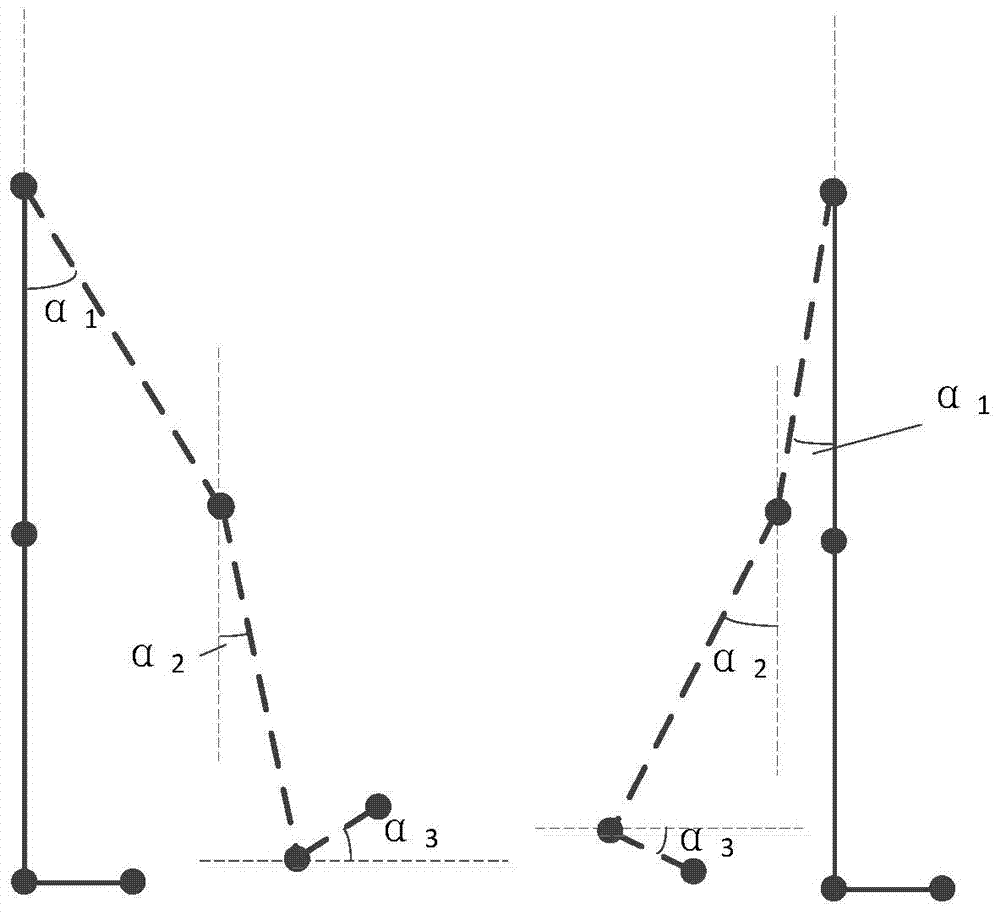
[0049] Such as image 3 As shown, it is assumed that the legs are perpendicular to the horizontal line when standing upright, and the feet are parallel to the horizontal line (the actual leg-shaped angle sensor collects the change angle of the thigh fixed plate as α 1 , the changing angle of the calf fixation plate is α 2 , the change angle of the foot is α 3 , the active force acquired by the press...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More