

Wrist rehabilitation training system based on muscle coordination and variable stiffness impedance control
An impedance control and rehabilitation training technology, applied in the fields of rehabilitation training and motor learning, can solve the problems of unable to exert the patient's initiative and enthusiasm, and not paying attention to the recovery of hand muscle strength, so as to increase the fun, high accuracy and improve the effect. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0037] The present invention will be further clarified below with reference to the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and not to limit the scope of the present invention.
[0038] The rehabilitation training task in the present invention generally refers to the free movement of the wrist and fingers in daily life, such as complex tasks such as taking things and doing housework. Here, the therapist / technician informs the goal of the game, and subjects can control the movement of the goal through finger and wrist movements to complete the task.
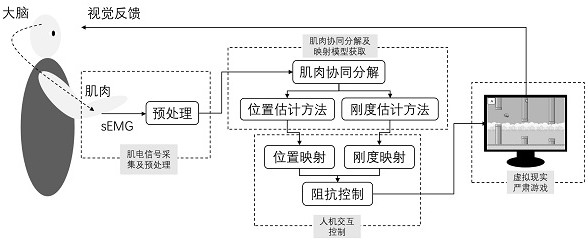
[0039] like figure 1 As shown, the wrist rehabilitation training system based on muscle coordination and variable stiffness impedance control provided by an example of the present invention includes the following steps:
[0040] (1) Collect surface EMG signals and preprocessing during flexion and extension of w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More