Ergonomic dynamic design method based on chaotic recognition
A technology of dynamic design and ergonomics, applied in the direction of instruments, self-adaptive control, control/regulation systems, etc., can solve the problems of drivers and operators such as psychological irritability, inability to use vibration, and easy occurrence of serious occupational diseases, so as to reduce personal injuries , Eliminate nonlinear vibration chaotic state response, reduce the effect of mental fatigue
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to facilitate the understanding of the technical solution of the present invention, the present invention will be described in further detail below in conjunction with the following examples, but the embodiments of the present invention are not limited thereto, and any equivalent embodiments that do not depart from the basic concept of the present invention belong to the protection of the present invention scope.
[0048] Here, taking the ergonomics dynamic design of a road roller as an example, the implementation process of the chaos recognition-based ergonomics dynamic design method of the present invention is described in detail.
[0049] According to the structural principle of the road roller, a dynamic model is established.
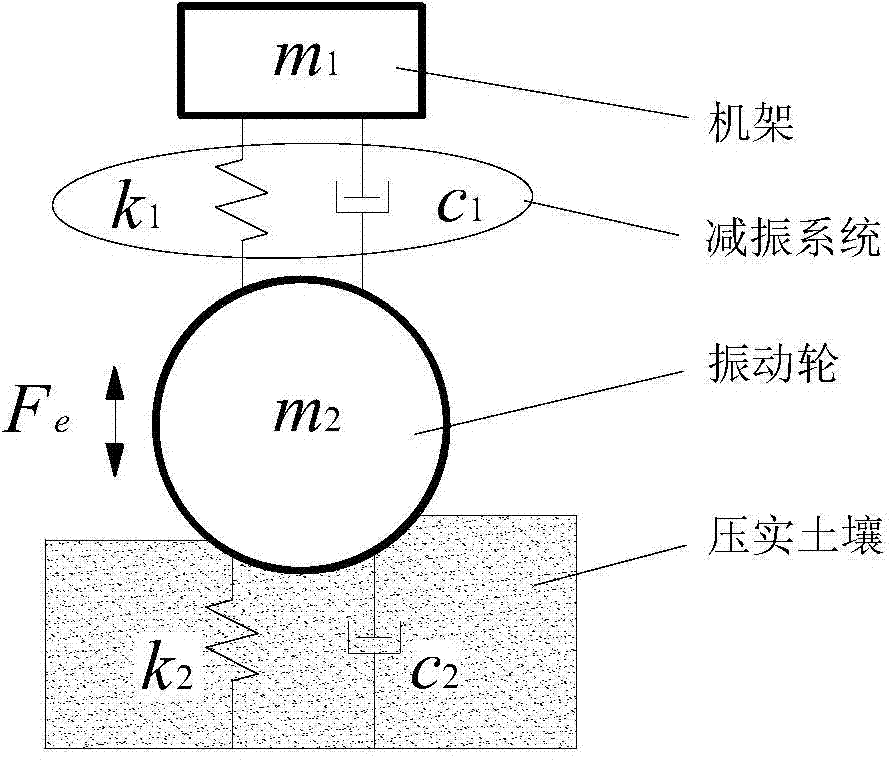
[0050] figure 1 It is a two-degree-of-freedom dynamic model diagram of the ergonomics dynamic design of the road roller.
[0051] The vibratory roller can be simplified as figure 1 The two-degree-of-freedom dynamic model shown, wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More