

PD boundary control simulation method for transverse vibration of flexible mechanical arm
A flexible manipulator, lateral vibration technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that the semi-physical simulation of flexible manipulator vibration boundary control is rarely reported.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
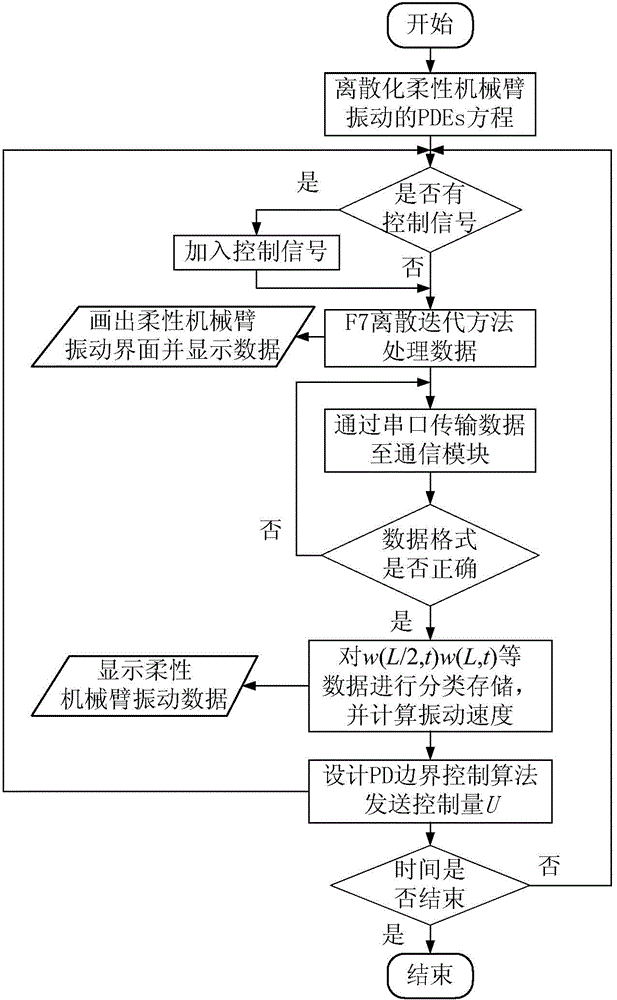
[0046] Such as figure 1 As shown in Fig. 1, a simulation method for PD boundary control of lateral vibration of a flexible manipulator is mainly composed of three modules. The model analysis uses the differential discrete method to discretize the partial differential equation, and then dynamically simulates the vibration of the flexible manipulator; the serial port communication module ensures real-time communication between the model analysis module and the control module through the agreement between the PC and the ARM development board. Data communication; the control module displays the vibration offset of the flexible manipulator in real time, and sends control signals to the PC through the ARM development board to monitor the vibration data of the flexible manipulator.
[0047]A method for simulating PD boundary control of lateral vibration of a flexible manipulator, comprising
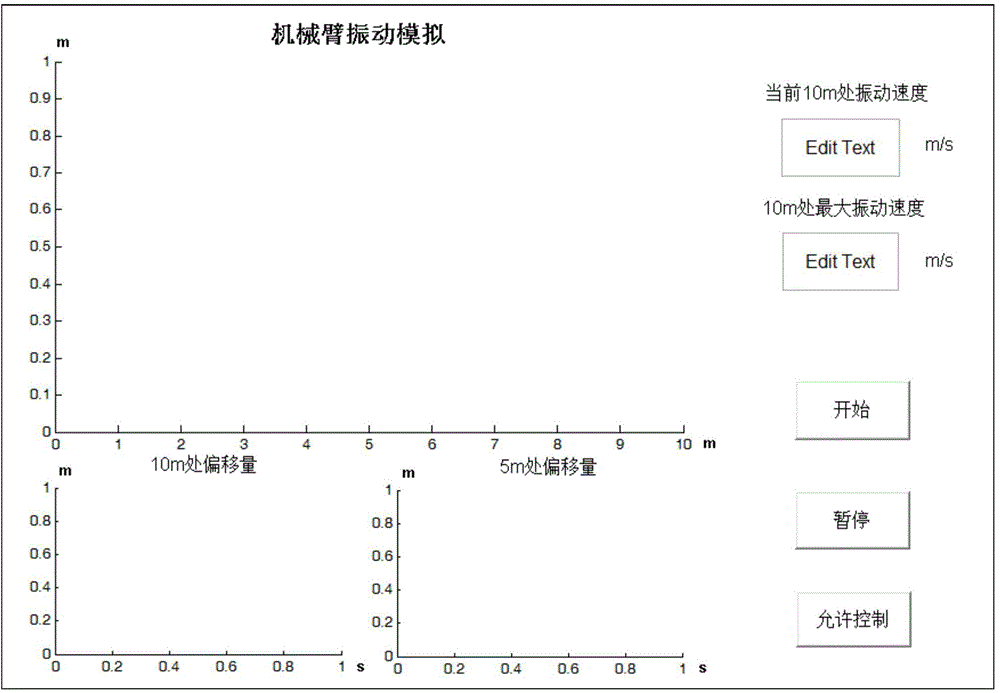
[0048] S1 builds the Matlab GUI interface on the PC to simulate the vibration of the flexib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More