

A joint calibration method between 360-degree panoramic laser and multiple vision systems
A vision system, joint calibration technology, applied in the field of environmental perception
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
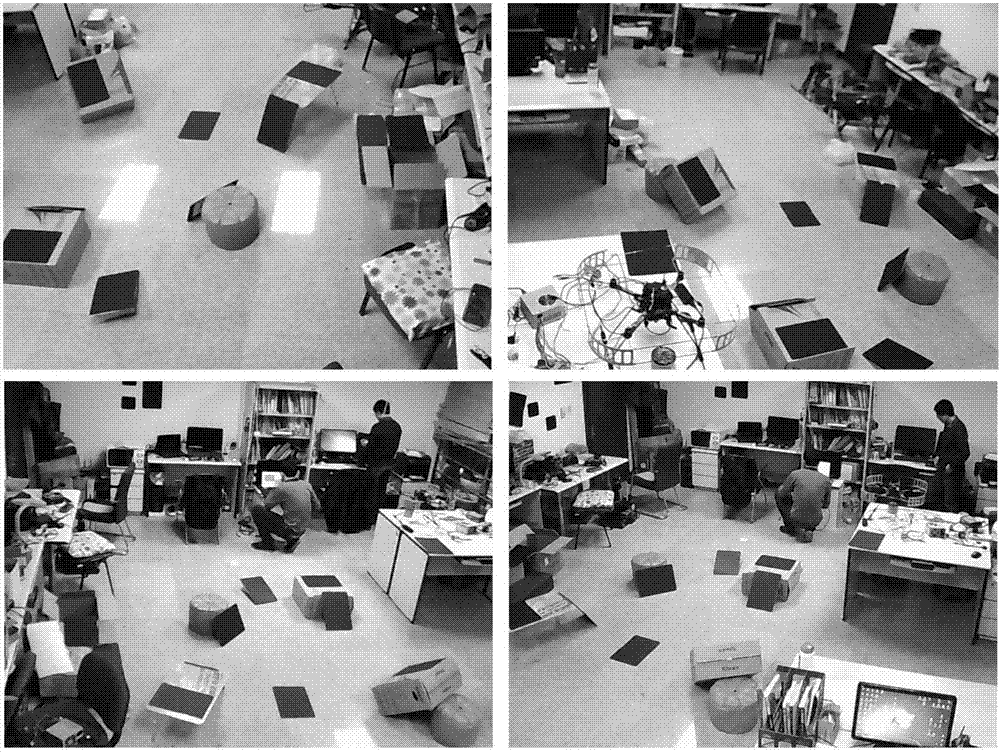
[0057] In order to verify the effectiveness of this method, the use of figure 2 The constructed sensor system was used to verify the calibration method. The panoramic laser sensor consists of a Hokuyo UTM-30LX laser sensor and a rotating pan / tilt. The plane scanning angle of the laser sensor is 0-270 degrees, and the frequency range of the stepping motor of the pan / tilt is 500-2500Hz. Use the motor to drive the laser sensor to obtain the three-dimensional laser ranging data of the scene. The four visual systems are all common ANC FULL HD1080P network cameras, using USB2.0 interface, with a viewing angle of 60 degrees and a resolution of 1280×960. The calibration device uses nine 300mm×100mm black papers, which are placed at different positions in the scene.
[0058] The pictures of the calibration device in the scene were collected from the four vision systems respectively (such as image 3 shown), the calibration device can be extracted from the picture using the correspo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More