

Object posture measuring method based on CAD model and monocular vision
A technology of monocular vision and pose measurement, applied in the field of visual measurement, can solve problems such as infeasibility and achieve low-cost effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
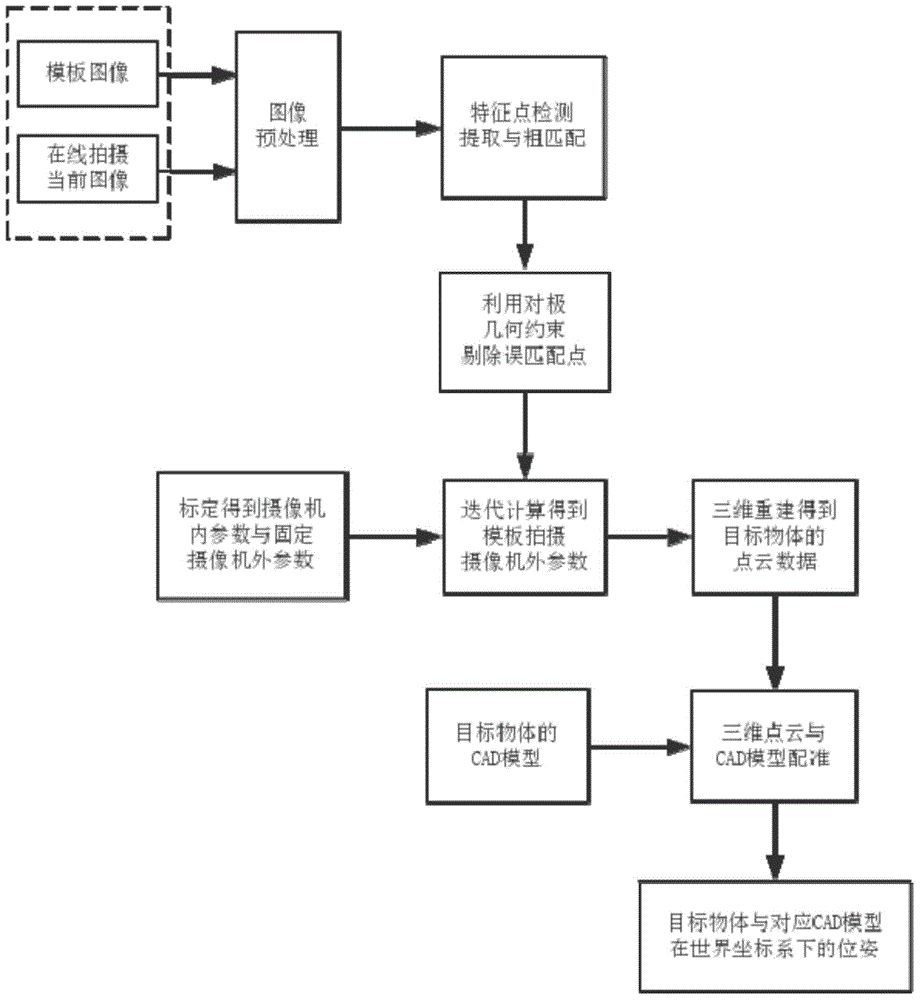
[0030] The steps of the object pose measurement method based on CAD model and monocular vision are as follows:
[0031] (1) Obtain the CAD model of the object;
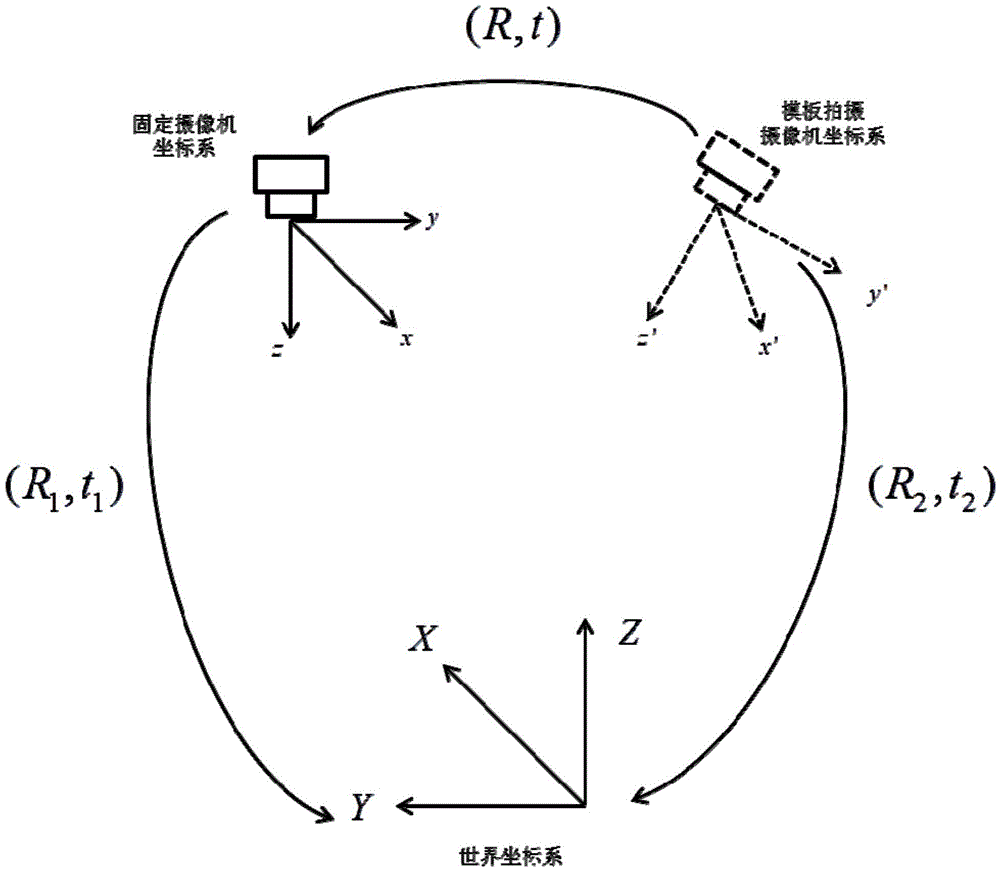
[0032] (2) Fix a single camera above the working area, calibrate the internal parameters of the camera, obtain the internal parameters and distortion coefficients of the camera, set the world coordinate system, take the workbench as the plane of z=0, and obtain the external parameters of the camera [ R 1 t 1 ], that is, the rotation and translation transformation of the camera coordinate system relative to the world coordinate system, where R 1 represents the rotation matrix, t 1Indicates the translation vector, the internal and external parameters of the camera can be calibrated with the help of a checkerboard, using the Zhang Zhengyou calibration method;
[0033] (3) Place the object in the center of the field of view, and take a standard template image of the target object;
[0034] (4) The camera shoots onli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More