

Test system for measuring repositioning precision of industrial robot
A repeatable positioning accuracy, industrial robot technology, applied in the direction of measuring devices, instruments, optical devices, etc., can solve the problems that are not conducive to simultaneous measurement of multi-station robots, high cost of laser trackers, single communication mode, etc., and achieve low cost , Flexible communication mode, high transmission rate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
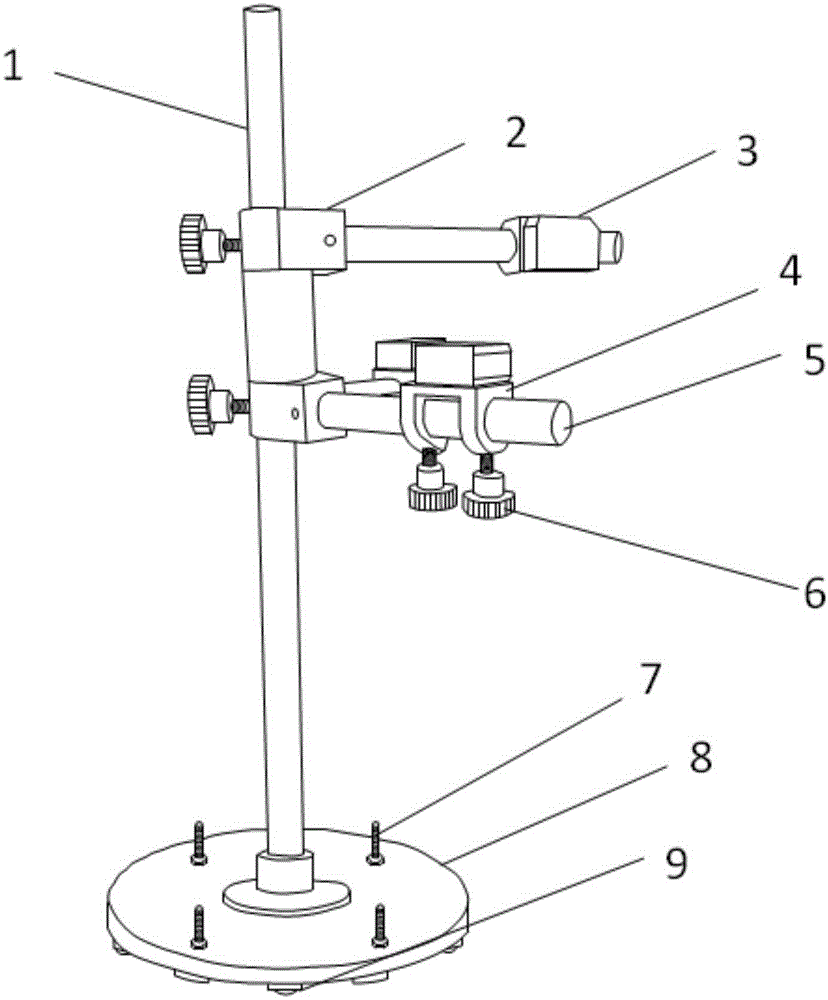
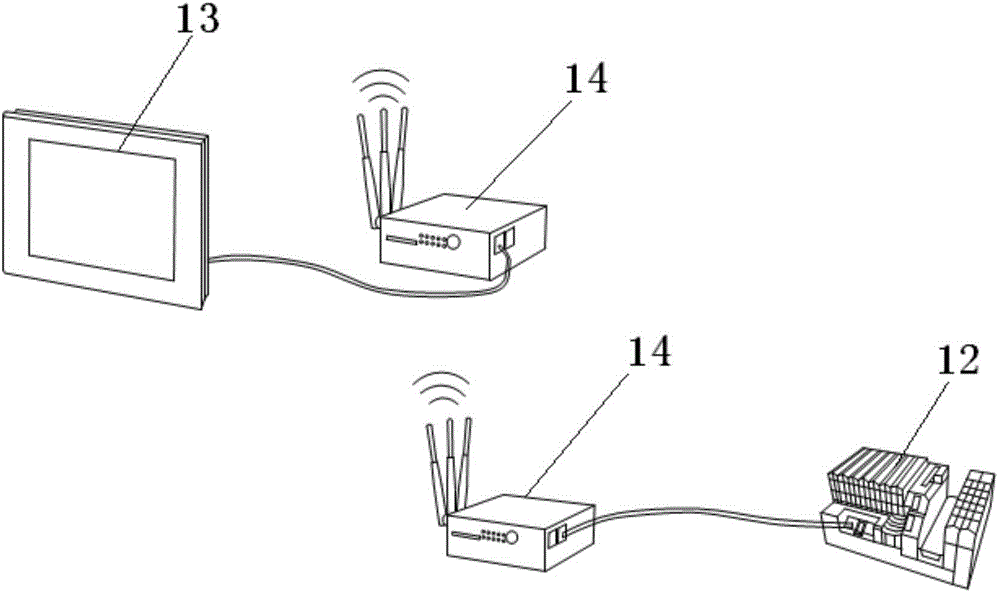
[0020] The present invention consists of three parts: a detection device, a data acquisition unit and a data processing terminal 13 . The detection device is that three axial supports 5 are arranged on the support sliding rod 1, and three laser displacement sensors 3 are installed on the axial supports 5, which are different and vertical in space. The laser displacement sensor 3 is installed on the bracket, which can be compared to a three-dimensional coordinate system in space. When measuring, by controlling the robot to reach the test center range of the sensor, ensure that the three-way light is projected to the end of the robot, and the position of the robot in the three coordinate axes of space can be measured by the principle of laser diffuse reflection.
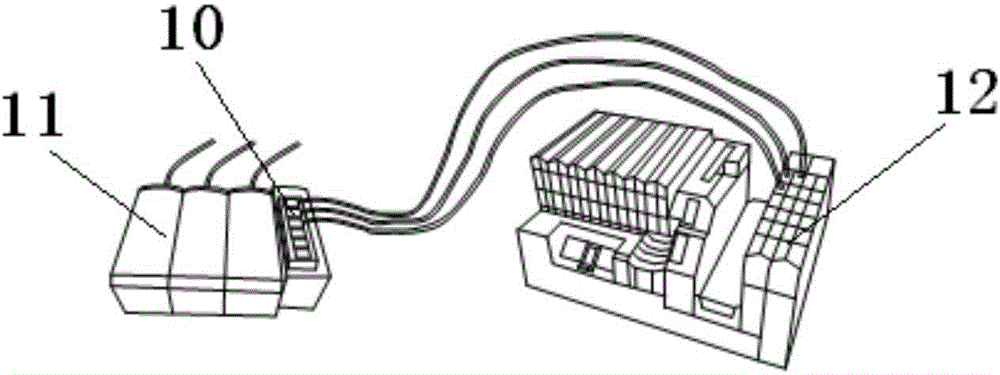
[0021] The data acquisition unit uses the controller 12 to read the measurement data in the amplifier 11 of the sensor. A corresponding communication unit 10 is installed between the controller 12 and the amplifier 11...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More