

Method for inhibiting position domain periodic interference of electromechanical servo system based on time sampling
An electromechanical servo system and position domain technology, applied in the field of servo control, can solve problems affecting the accuracy of equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
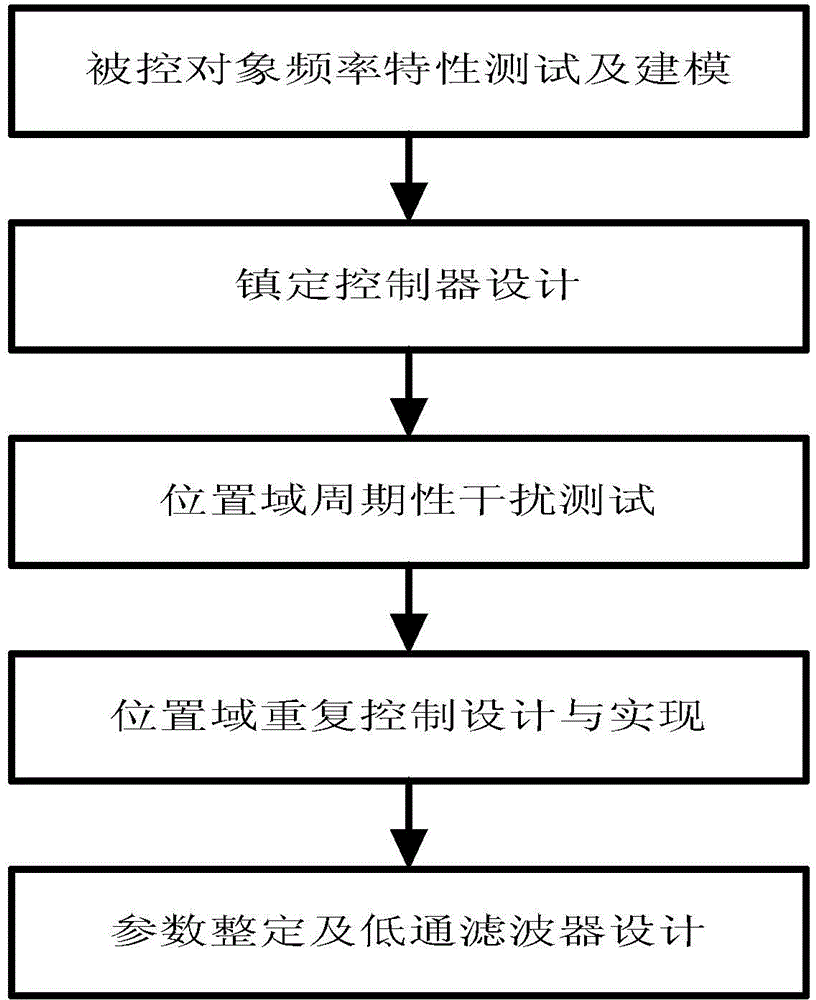
[0022] Specific implementation mode one: the following combination figure 1 , figure 2 , image 3 , Figure 4 Describe this embodiment, a method for suppressing periodic interference in the position domain of an electromechanical servo system based on time sampling described in this embodiment, is characterized in that the method includes the following steps:
[0023] Step 1. Testing and modeling of the frequency characteristics of the controlled object in the electromechanical servo system;
[0024] Step 2, designing a stabilizing controller for the controlled object model obtained in step 1;
[0025] Step 3, using the closed-loop system with the stabilizing controller described in step 2 to test the periodic interference in the position domain of the electromechanical servo system, and obtain the frequency and amplitude of the periodic interference in the position domain;
[0026] Step 4. According to the frequency of periodic interference in the position domain measure...
specific Embodiment approach 2
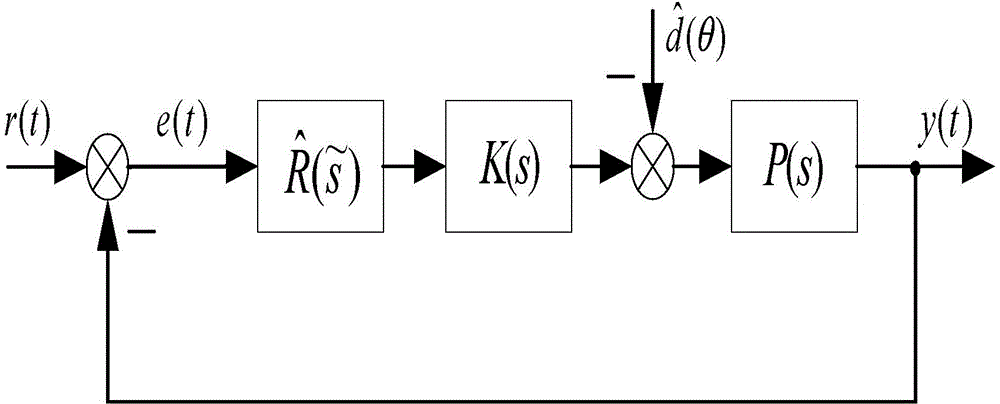
[0031] Specific implementation mode two: the following combination figure 2 Describe this embodiment, the difference between this embodiment and specific embodiment 1 is: the frequency characteristic test and modeling of the controlled object of the electromechanical servo system described in step 1 are as follows:
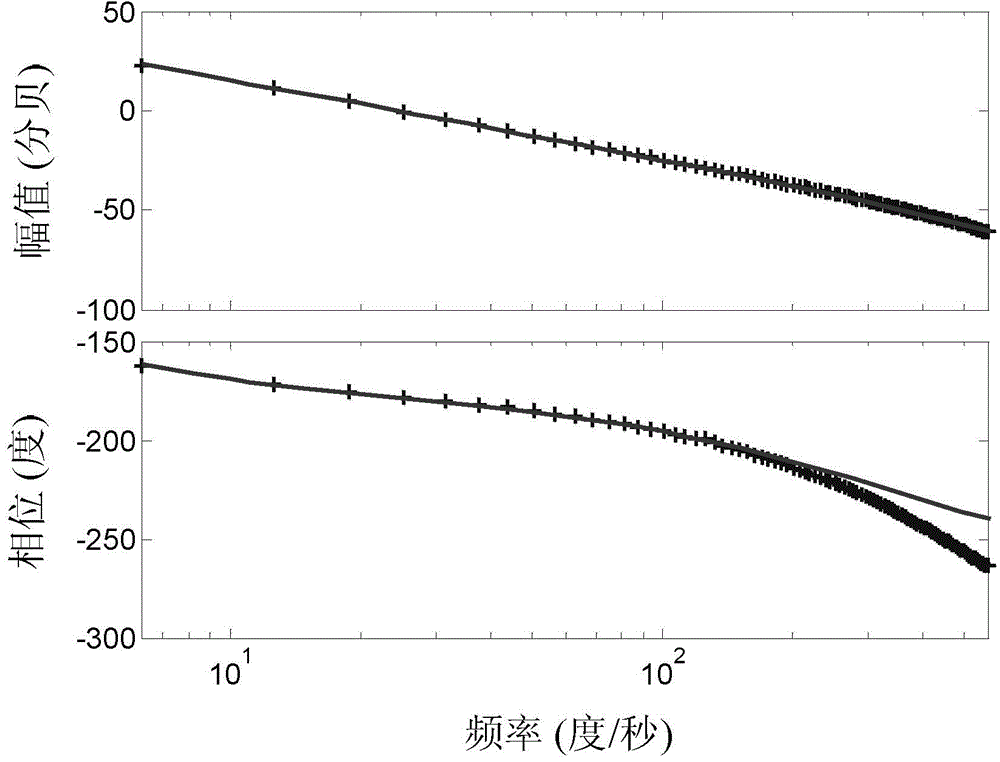
[0032] Firstly, the frequency characteristic test of the electromechanical servo system is carried out: under the open-loop condition of the electromechanical servo system, a sinusoidal command is input to the controlled object, and the amplitude ratio and phase angle difference between the output signal and the input signal of the controlled object are obtained at different frequencies; then Model the controlled object of the electromechanical servo system: use the Matlab identification toolbox to fit the obtained amplitude ratio and phase angle difference to obtain the controlled object model.
specific Embodiment approach 3
[0033] Specific implementation mode three: the following combination image 3 Describe this embodiment, the difference between this embodiment and the specific embodiment 1 or 2 is that the stabilized controller design for the controlled object model obtained in step 1 described in step 2 is as follows: according to the resonance frequency of the electromechanical servo system and the noise frequency range to determine the crossover frequency ω c According to the frequency method of classic automatic control theory, the stabilizing controller is designed, and the phase angle margin is between 50 degrees and 60 degrees.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More