

Local curved surface change factor based scattered point cloud data compaction processing method
A point cloud data and change factor technology, applied in image data processing, 3D modeling, instruments, etc., can solve the problems of reduced search efficiency, affecting the speed and accuracy of point cloud data reduction, and cannot guarantee the accuracy of the model, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
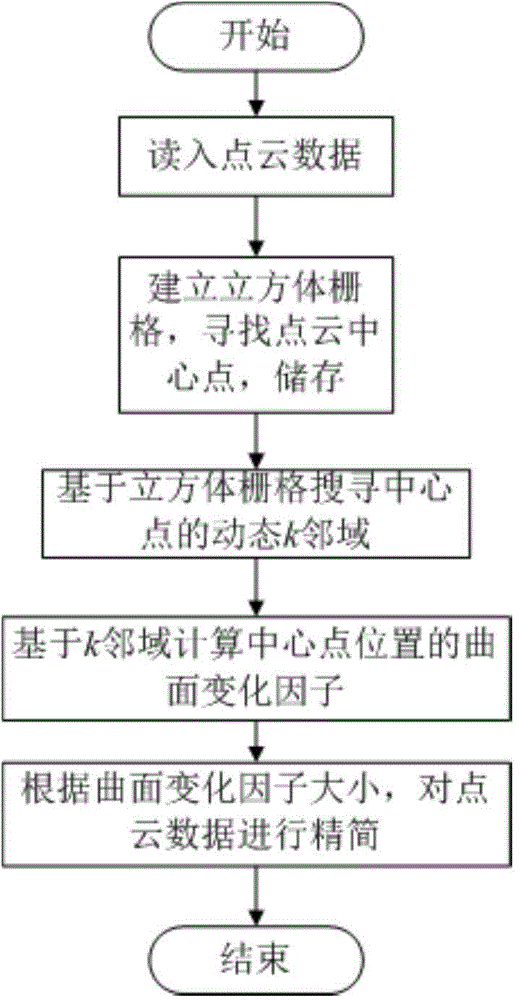
[0059] In a method for streamlining and processing scattered point cloud data based on local surface change factors in the present invention, the point cloud data of a robot avatar is taken as an example for streamlining, and the streamlining rate is set to 82.0%. The specific process is as figure 1 shown, including the following steps:
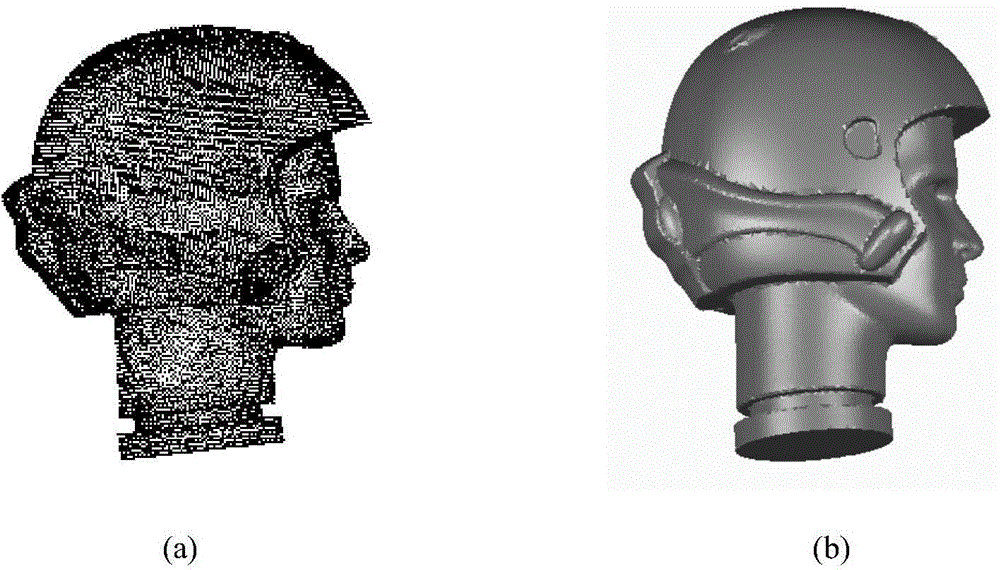
[0060] Step 1. Read the original point cloud data, such as figure 2 As shown in (a), the total number of point cloud data N=38790 points, figure 2 (b) is the display effect diagram of the corresponding point cloud data triangular grid.
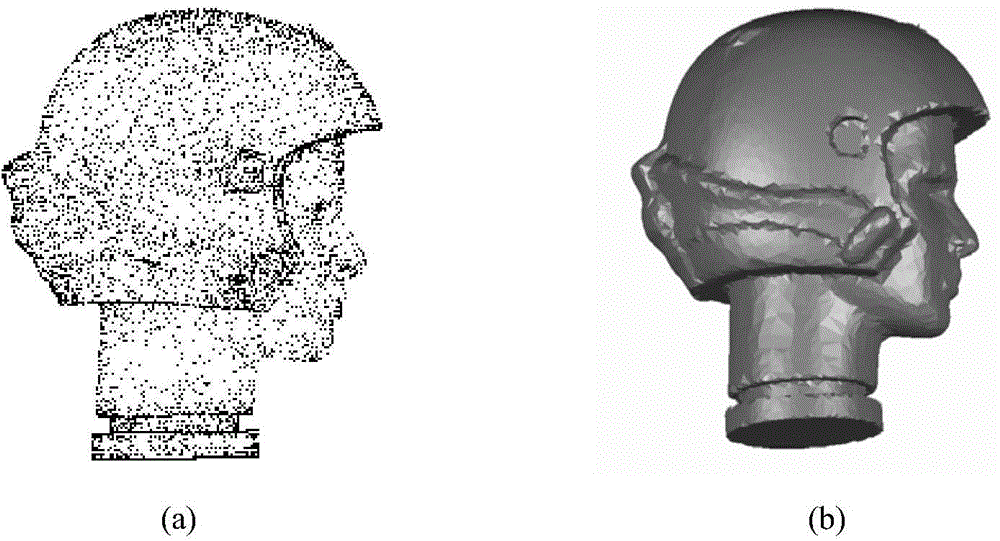
[0061] Step 2: Obtain the center point of the point cloud. Set the maximum number of neighborhood points of the center point K=20, and the regulation factor α=0.68.
[0062] According to the density ρ of the point cloud (obtained by ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More