A Cartesian Coordinate Robot Combined with a 3-DOF Wrist Structure
A Cartesian coordinate and robotic technology, applied in the field of robotics, can solve problems such as the inability to expand the robot's degree of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Next, the structure and effect of the Cartesian robot combined with the 3-DOF wrist structure of the present invention will be described with reference to the accompanying drawings.
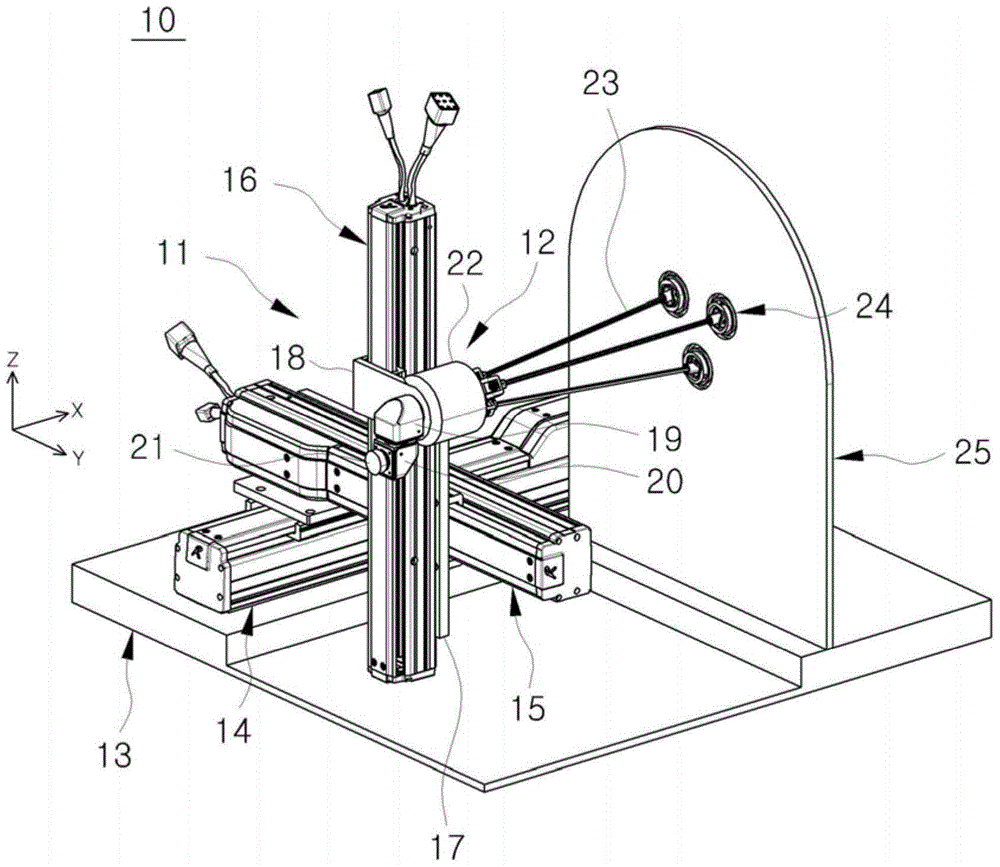
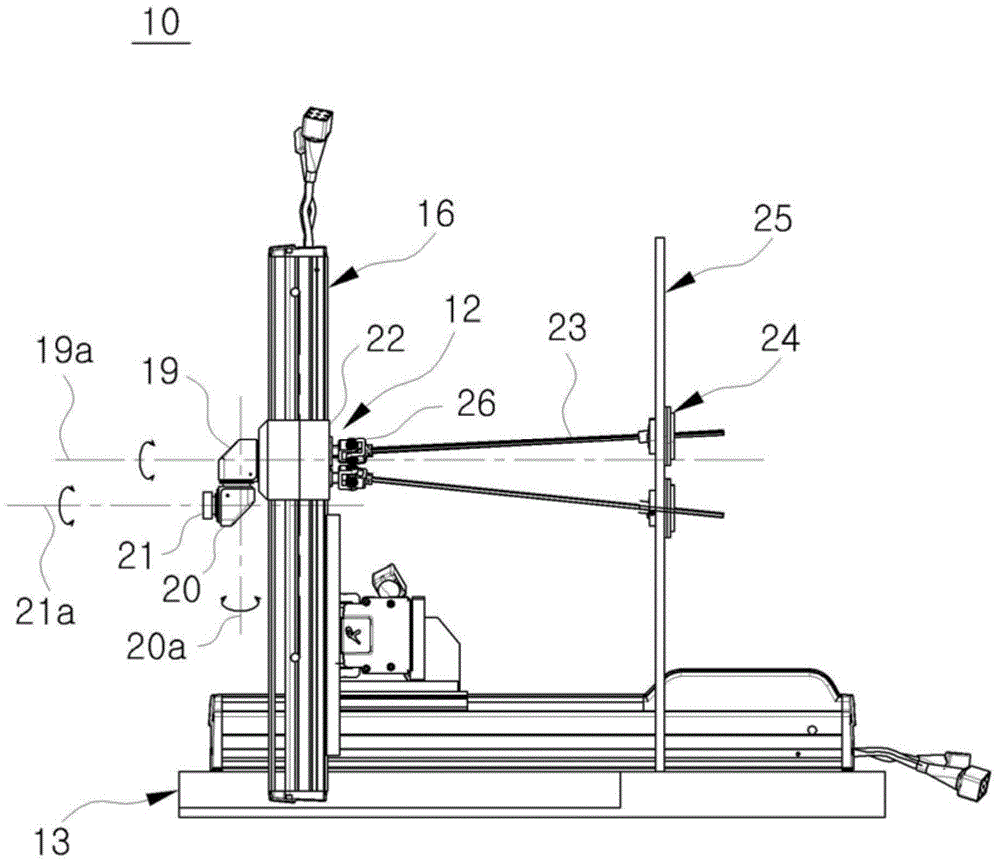
[0043] figure 1 It is a cross-sectional view of a Cartesian coordinate robot combined with a 3-DOF wrist structure of the present invention.
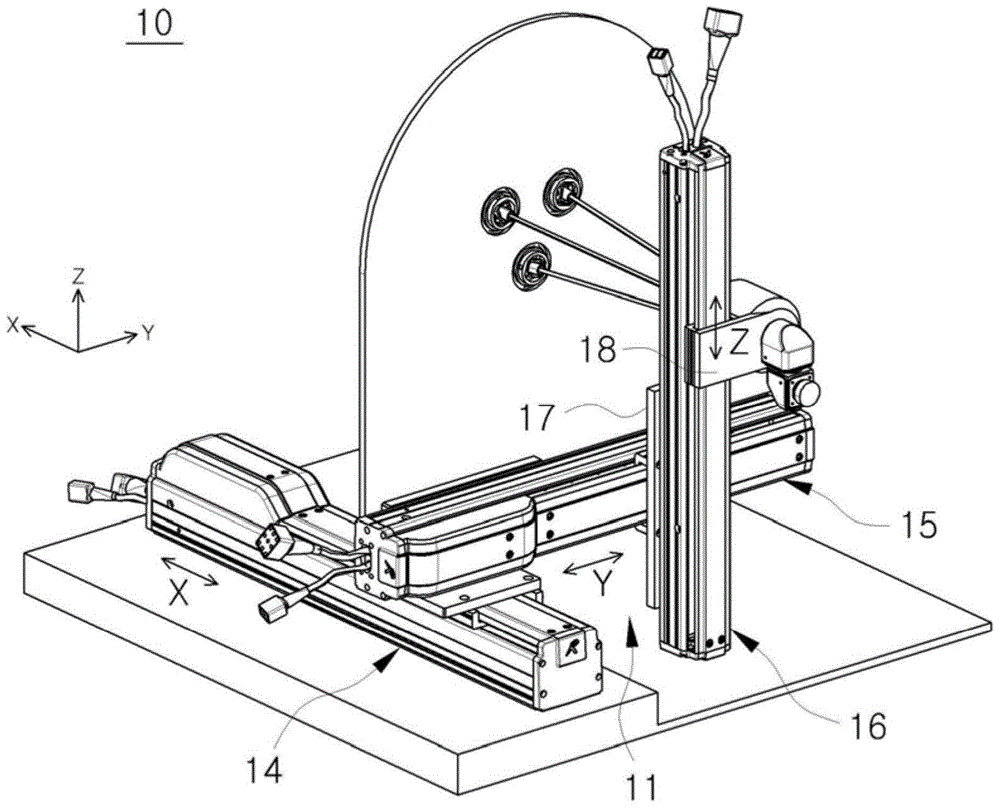
[0044] Such as figure 1 As shown, the Cartesian coordinate robot (10) combined with a 3-DOF wrist structure of the present invention roughly includes a Cartesian coordinate robot (11) and a wrist (12).
[0045] A base part (25) for driving a rectangular coordinate robot (11) and a wrist (12) is installed on a base (13) having a predetermined shape.
[0046] The wrist (12) can be combined to carry out linear motion by the Y-axis direction through the medium of the second sliding block (18), and can slide along the Z-axis frame (16) of the rectangular coordinate robot (11).
[0047] In the drawings, when the three coordinate axes are specified as X...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More