

Gliding machine dolphin
A dolphin and machine technology, applied in the direction of non-rotating propulsion components, etc., can solve the problems of high energy consumption and weak endurance of machine dolphins, and achieve the effects of fast adjustment speed, strong maneuverability, and large adjustment range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
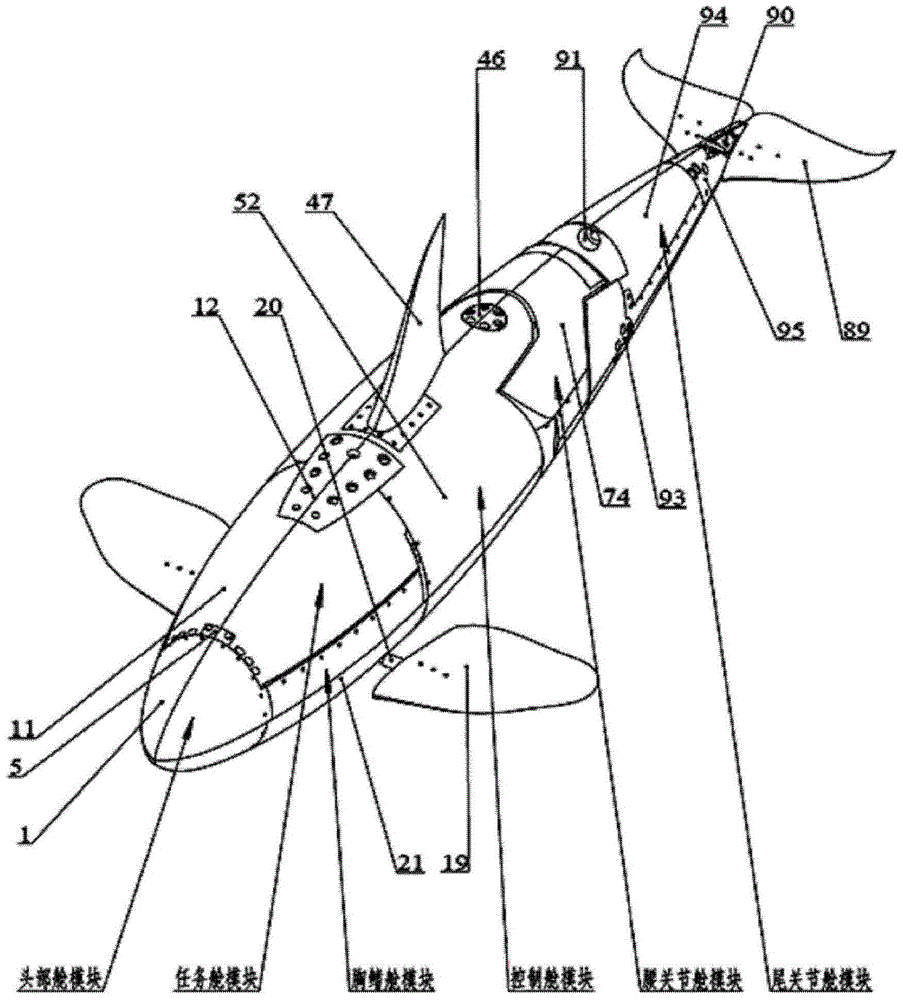
[0036] The invention discloses a gliding robot dolphin, the body of which is designed in imitation of the body of a biological dolphin, and can realize two motion modes of dorso-abdominal propulsion and buoyancy-driven propulsion.
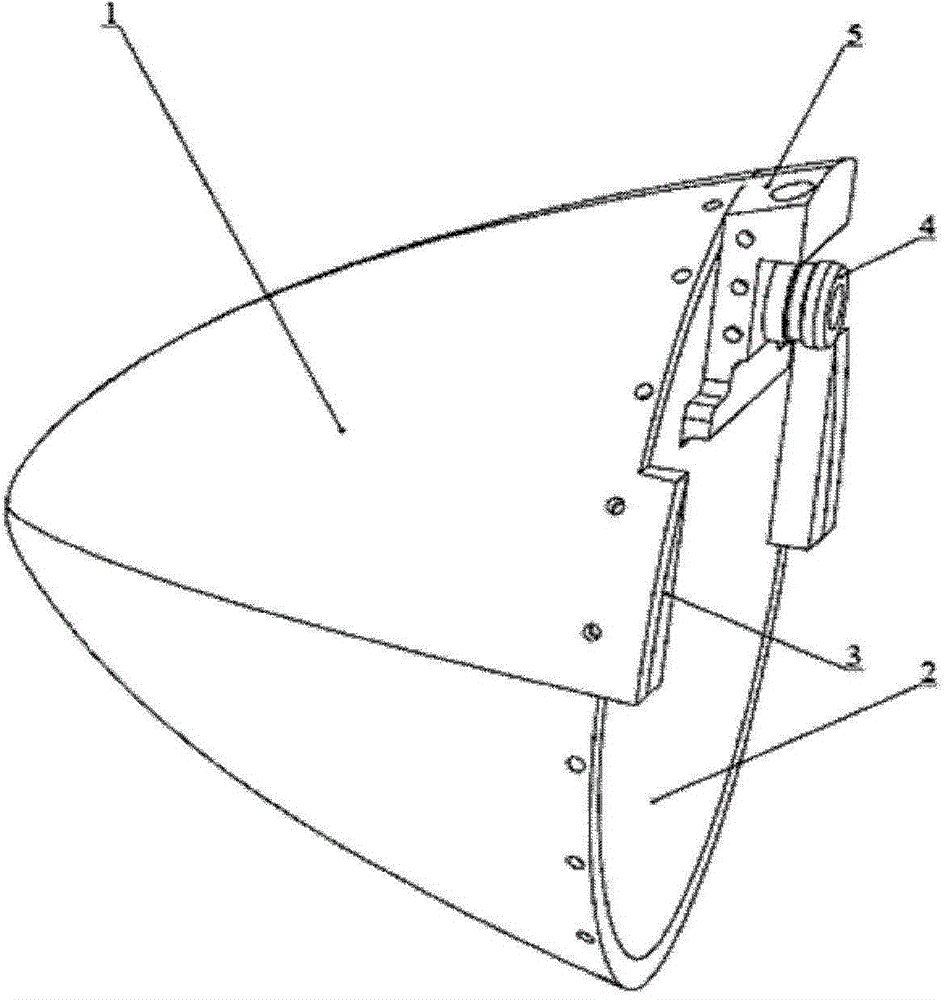
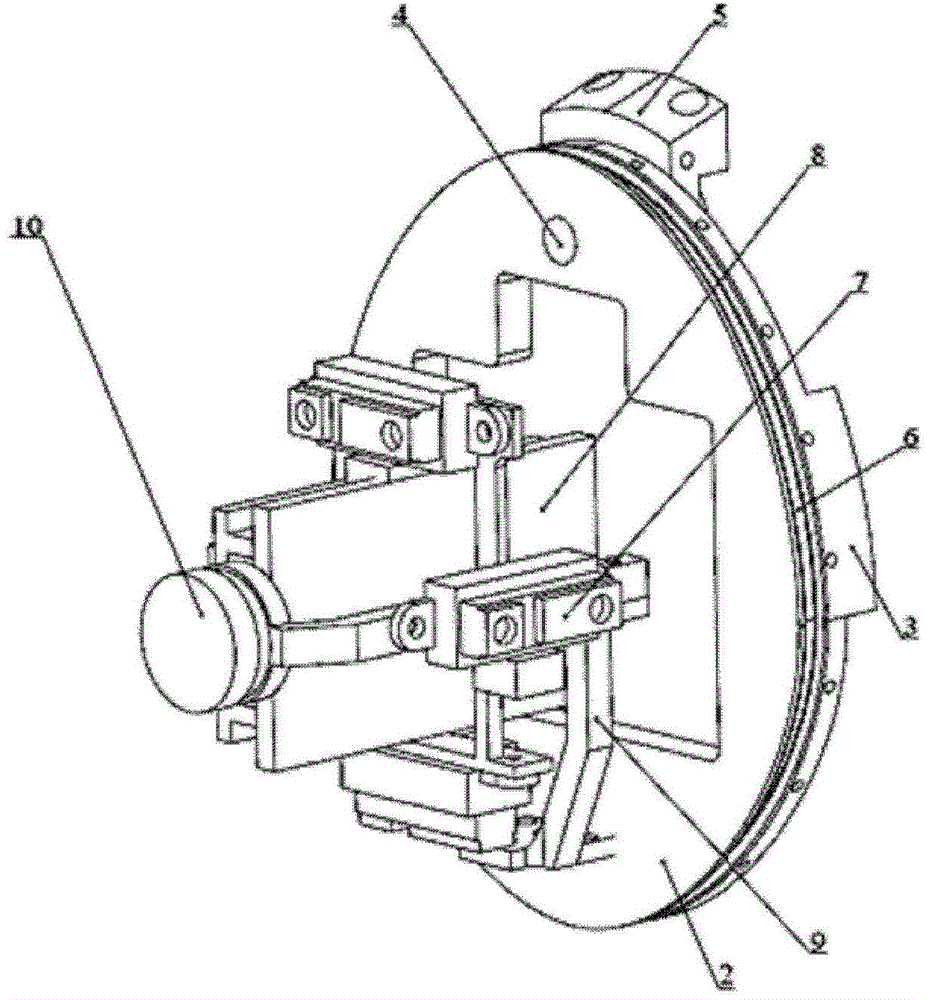
[0037] The gliding robot dolphin adopts a modular design, at least comprising a pectoral fin module located at the pectoral fin of the gliding robot dolphin, a waist joint module and a tail joint module located at the rear of the gliding robot dolphin, and the pectoral fin module includes Suction and drainage mechanism, the waist joint cabin module includes a tail drive mechanism, and the tail joint cabin module includes a tail fin drive mechanism; wherein, the gliding robot dolphin makes the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More