

Autonomous underwater vehicle propeller fault detecting method based on wavelet single branch reconstruction
An underwater robot, single-branch reconstruction technology, applied in instruments, special data processing applications, electrical digital data processing, etc., can solve the problems of AUV measurement noise impact, difficult to accurately detect the sequence position when the thruster failure occurs, etc. achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The attached drawings are attached below.
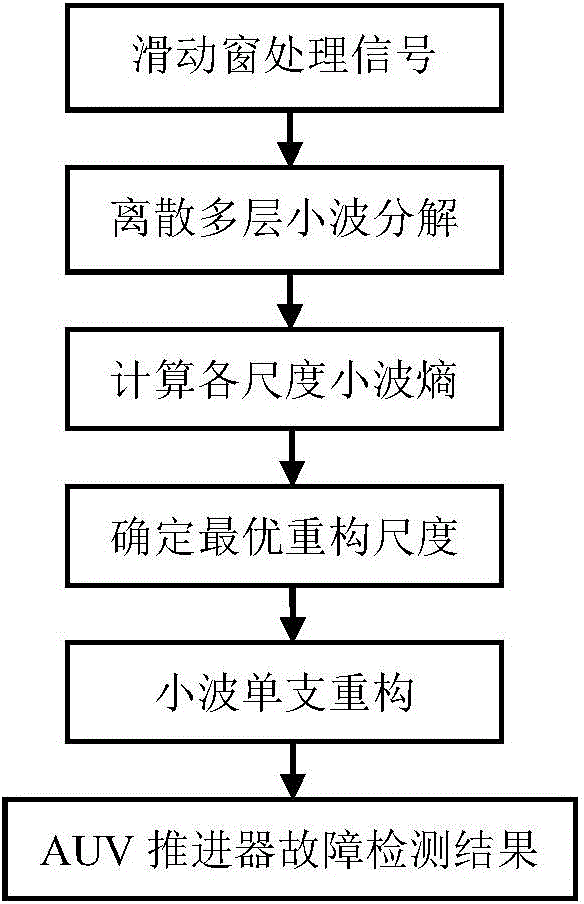
[0024] to combine figure 1 The specific implementation steps of the fault detection method of the present invention are as follows:
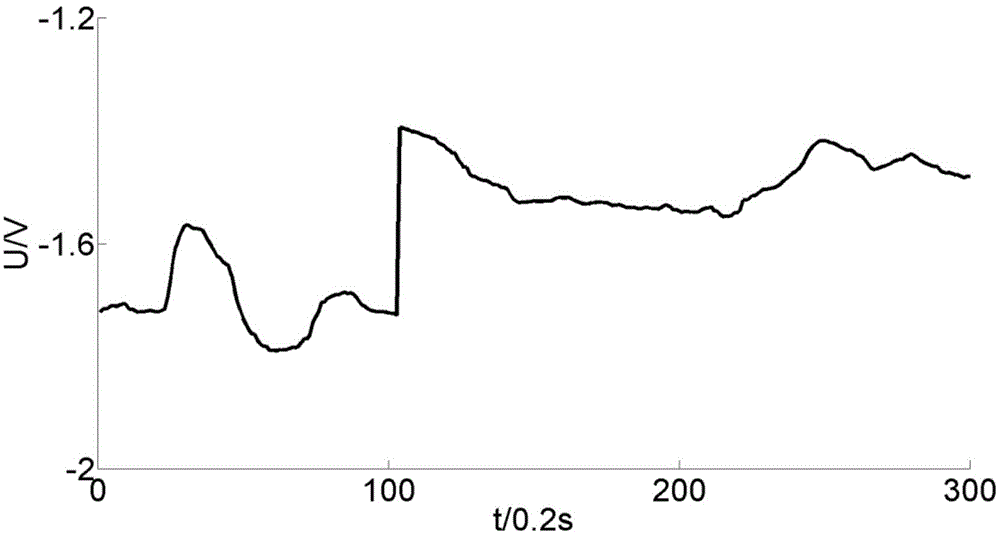
[0025] 1. Sliding window processing signal: when the control signal data with a data length of L=300 is collected, the detection algorithm is started, and when new data is collected again, the first data of the original array is discarded and the newly collected data is placed in the original At the end of the array, always keep the data length as L=300, and the original data of the AUV controller signal is as follows figure 2 shown.
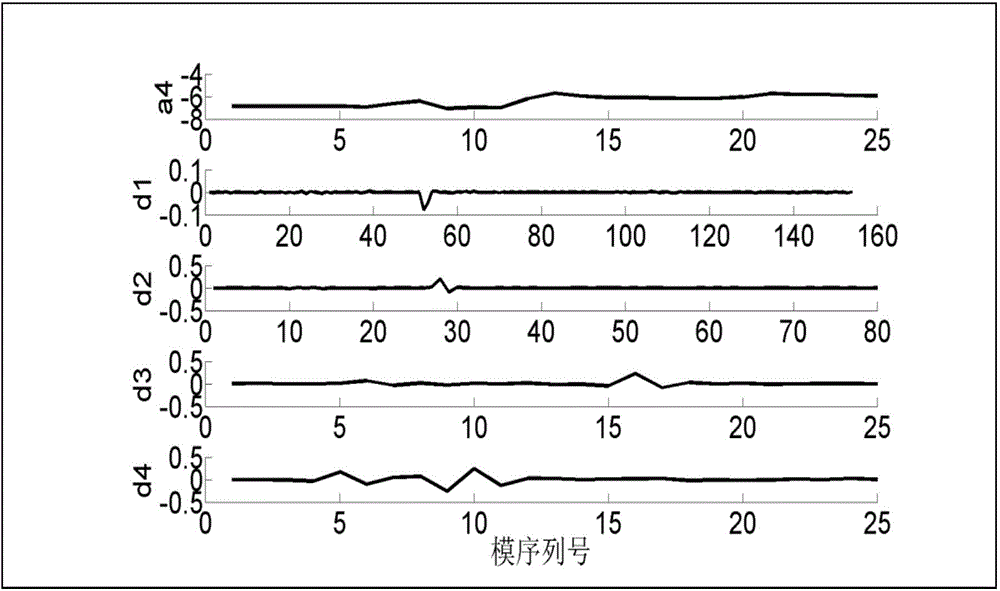
[0026] 2. Discrete multi-layer wavelet decomposition: use the discrete multi-layer wavelet decomposition method to decompose the autonomous underwater vehicle control signal data, and perform W=4-level wavelet analysis on the autonomous underwater robot sensor and controller signals intercepted in step (1). Decomposition, the wavelet basis function is "db4", a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More