

Ultrasonic standing wave suspension clamping type carrying mechanical hand
An ultrasonic standing wave and manipulator technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve problems such as failure to meet assembly accuracy requirements, component damage or pollution, and achieve improved production quality, simple structure and principle, and reduced pollution. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The embodiments will be described in detail below in conjunction with the accompanying drawings.
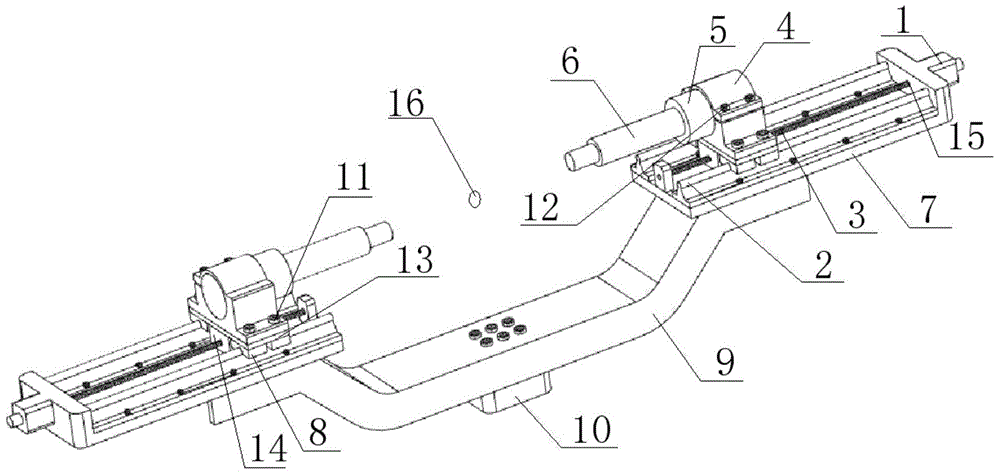
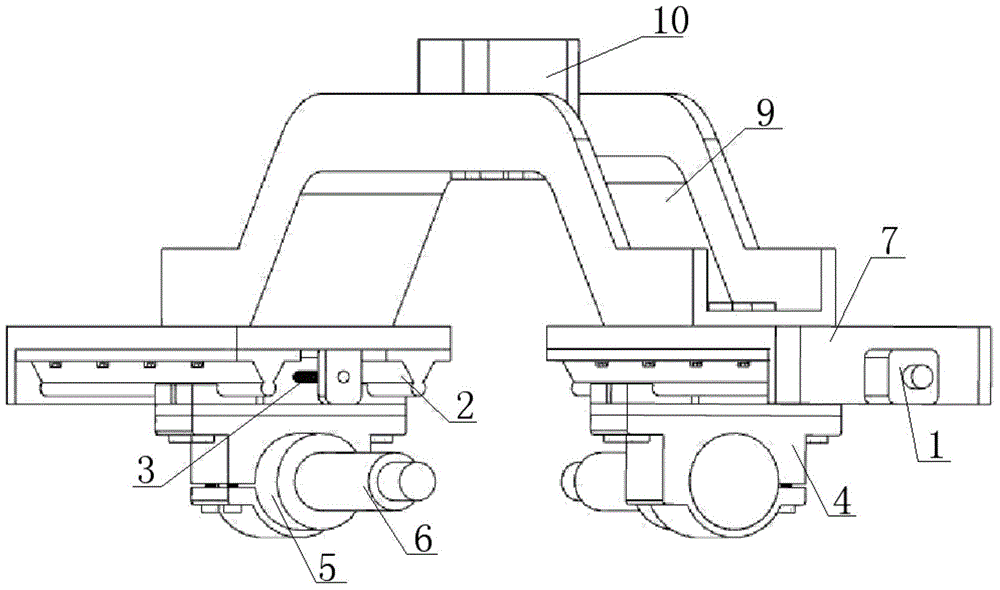
[0033] see Figure 1-8 In this embodiment, the ultrasonic standing wave suspension clamping and handling manipulator is used for non-contact clamping of the workpiece, which includes a beam 9 and a guide rail platform 7. The cross-section of the beam 9 is U-shaped, and a connecting piece 10 is installed on the outer surface of the geometric center of the beam 9. It is connected with the end of the multi-degree-of-freedom robot arm through the connecting piece 10.
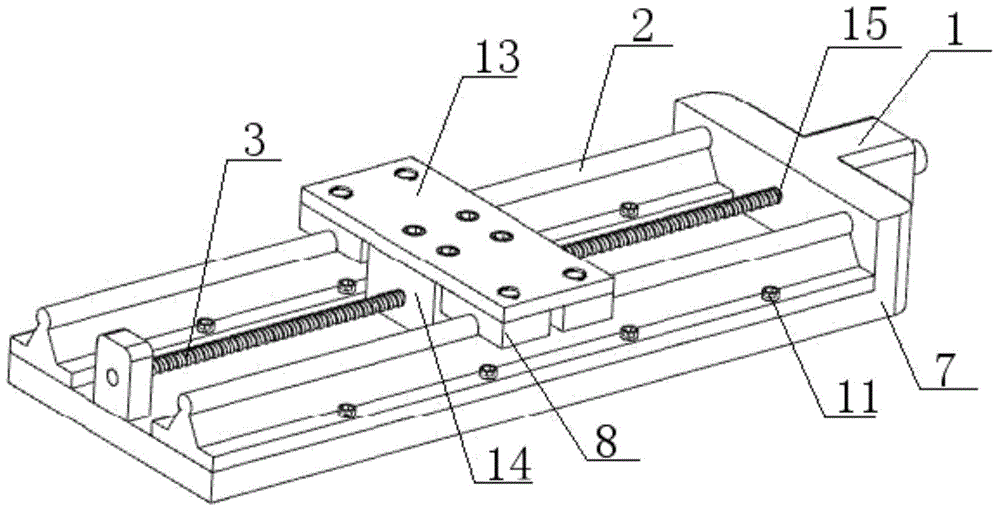
[0034] Two guide rail platforms 7 are installed symmetrically at the two ends of the beam 9, and the guide rail platforms and the beam are connected by fixing bolts. Two parallel and symmetrical guide rails 2 are installed on the guide rail platform 7 along the length direction through fixing bolts 11 . Each guide rail 2 is slidably matched with an outer slider 8, and the two outer sliders 8 on the same side a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More