

Distributed fuzzy cooperative tracking control method for network euler‑lagrange systems
A tracking control and distributed technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., to achieve the effect of reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0026] Specific embodiment one: the network Euler-Lagrange system distributed fuzzy cooperative tracking control method of the present embodiment, it realizes according to the following steps:
[0027] Step 1: Process the Euler-Lagrange dynamic model of the agent following the double-joint manipulator, and classify the nonlinear uncertain items of the model according to their sources to obtain and
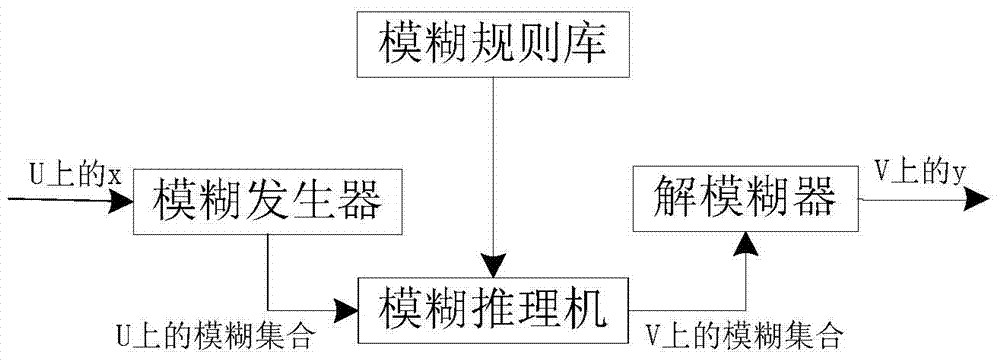
[0028] Step 2: Adopt adaptive fuzzy control system design to realize the two types of nonlinear uncertain terms of the model respectively and Perform dynamic online approximation;
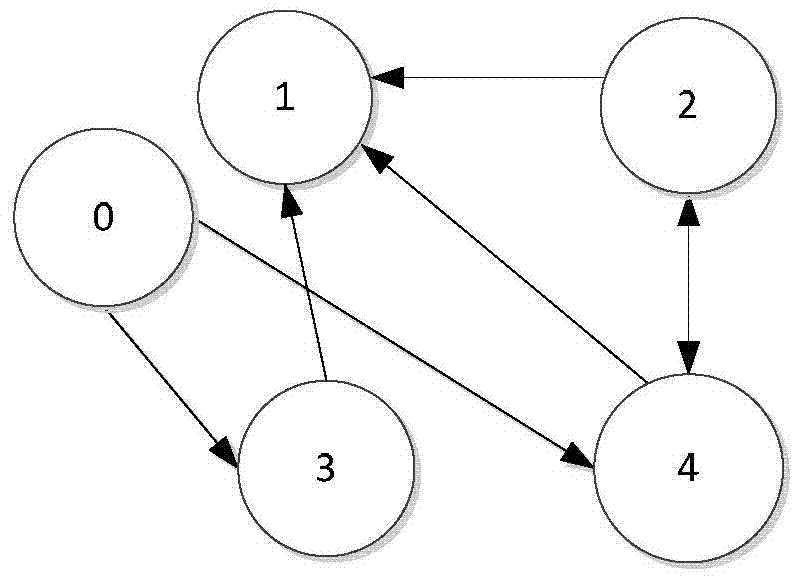
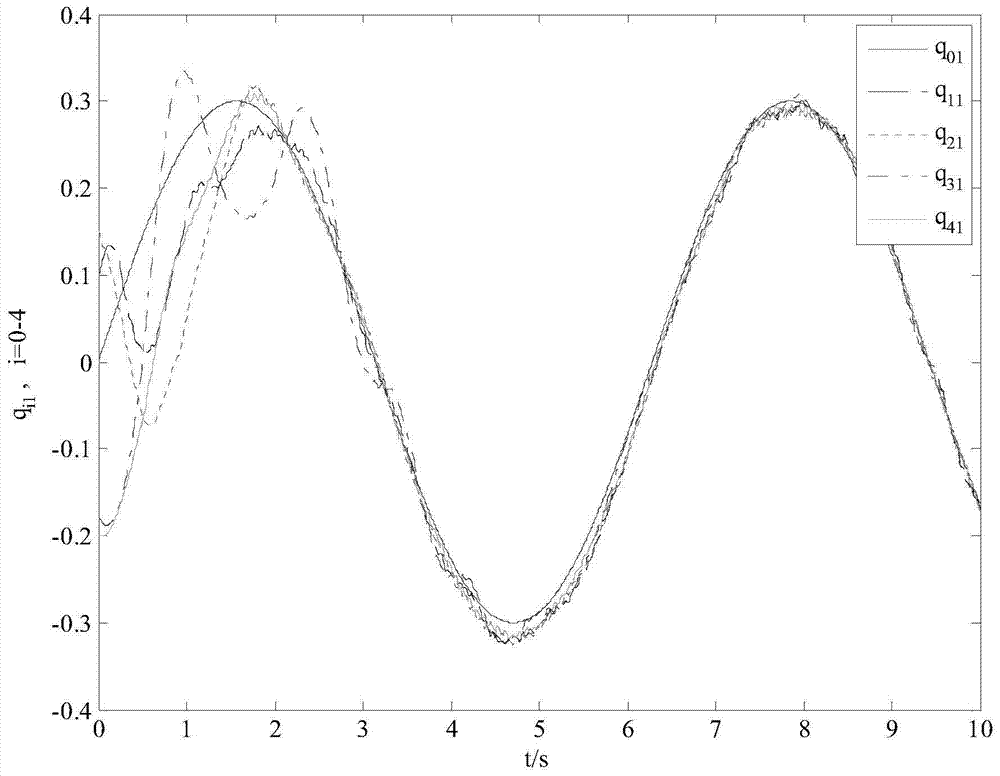
[0029] Step 3: Using the distributed adaptive fuzzy cooperative tracking control algorithm, design τ i So that all the agents following the dual-joint manipulator can asymptotically track the rotation angle of the leading two-joint manipulator agent, so that the tracking error q i -q 0 tends to zero; among them, the q i is the rotation angle following the double-joint manipulator agent i, and...
specific Embodiment approach 2
[0062] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is: the step 1 is specifically:
[0063] Known M i (q i ), and g i (q i ) nominal value and i=1,...,n represents the number of the agent following the double-joint manipulator, and each follower agent of the double-joint manipulator can obtain all the information of its own rotation angle, rotational angular velocity and rotational angular acceleration, the i-th follower of the double-joint manipulator intelligent The dynamic model of the body can be written in the following Euler-Lagrange form:
[0064]
[0065] in:
[0066]
[0067]
[0068]
[0069]
[0070] q i is the rotation angle of the ith agent following the double-joint manipulator;
[0071] is the rotational angular velocity of the i-th robot following the double-joint manipulator;
[0072] is the rotational angular acceleration of the i-th robot followin...
specific Embodiment approach 3
[0091] Specific implementation mode three: the difference between this implementation mode and specific implementation mode one or two is: the step 2 is specifically:
[0092] fuzzy system and non-linear uncertain terms and make an approximation
[0093]
[0094]
[0095] in, and j=1,...,m are parameter vectors, let
[0096] and is the fuzzy basis function vector, s represents the dimension of the fuzzy basis vector, and T is the transpose symbol. For the generalized uncertain part and The ideal approximation model is and
[0097]
[0098] in:
[0099]
[0100]
[0101] where: ψ ai for θ ai set of ψ bi for θ bi set of θ ai and θ bi Online update according to adaptive law (8) and (9) respectively
[0102]
[0103]
[0104] make
[0105]
[0106] Respectively for and The approximation error of , and there is a constant w aij and w bij satisfy w aij ≥|ε aij |,w bij ≥|ε bij |where i=1,...,n, j=1,...,m. The othe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More