

Robot mowing system capable of customizing mowing zone and control method thereof
A robot and lawn mower technology, applied in the field of robot mowing system and its control, can solve problems such as poor contact, inability to customize the mowing area at any time, and no remote control function, etc., to achieve free mowing paths and personalized custom mowing Grass area effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
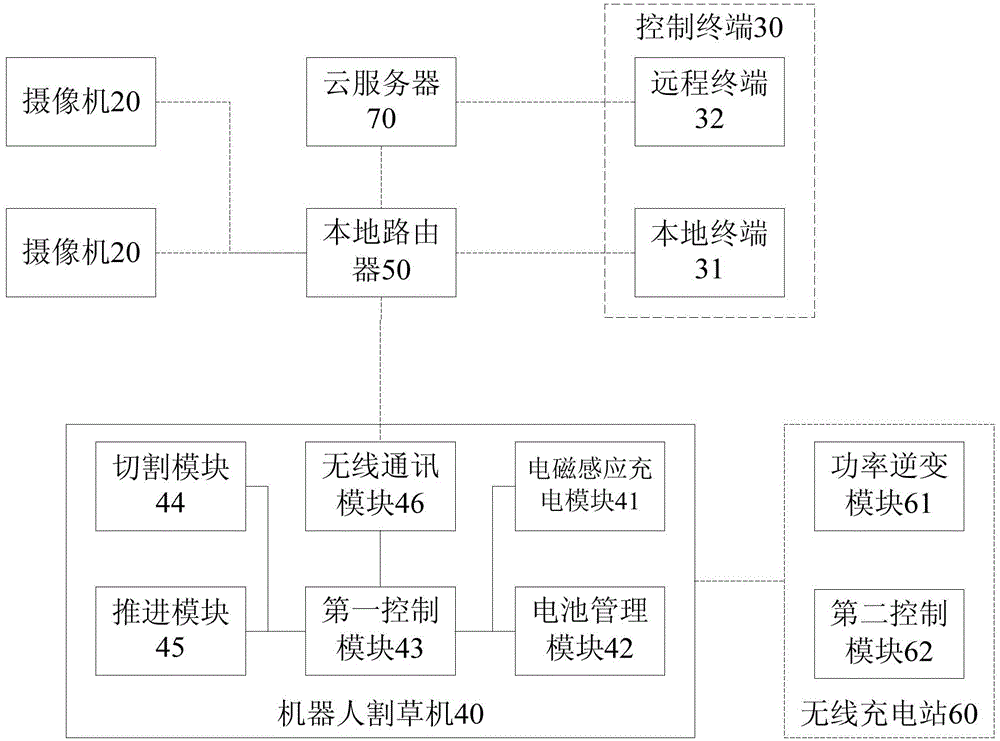
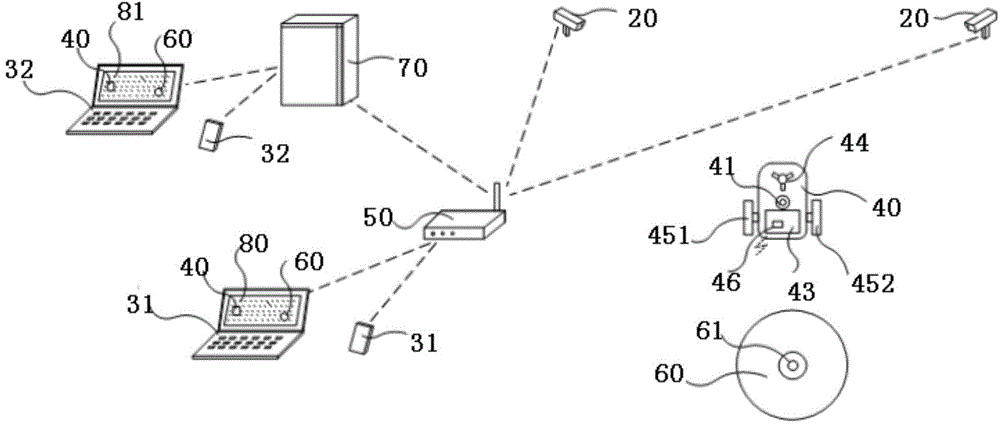
[0039] figure 2 A robot mowing system that can customize a mowing area in an embodiment of the present invention is shown, and the robot mowing system includes: at least one camera 20 , a control terminal 30 , a robot mower 40 and a local router 50 .
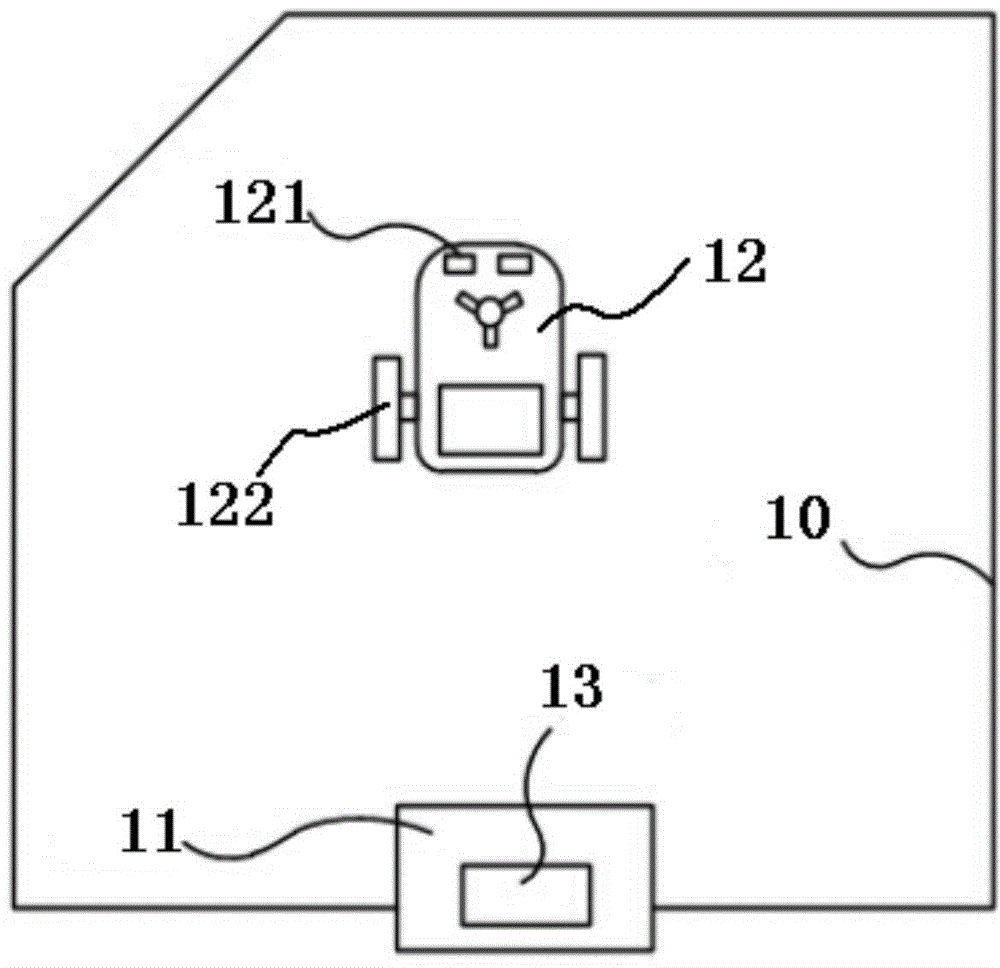
[0040] At least one camera 20 is used to collect the mowing area image and send it to the control terminal 30 through the local router 50. It can be understood that the number of cameras 20 can be determined according to the size of the mowing area that needs to be determined. In this embodiment, the customized The mowed area is the coverage area of images of the mowed area captured by one or more cameras 20 .
[0041]The control terminal 30 is used to control at leas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More