

Rotating-sector-laser-based position and pose measurement method of cantilever excavator
A cantilever roadheader and fan laser technology, which is applied in the directions of measuring devices, measuring instruments, surveying and navigation, etc., can solve problems such as poor visibility, calibration of inertial navigation systems, and miscellaneous equipment, and achieves low cost and high automation. Measure and improve the effect of molding quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
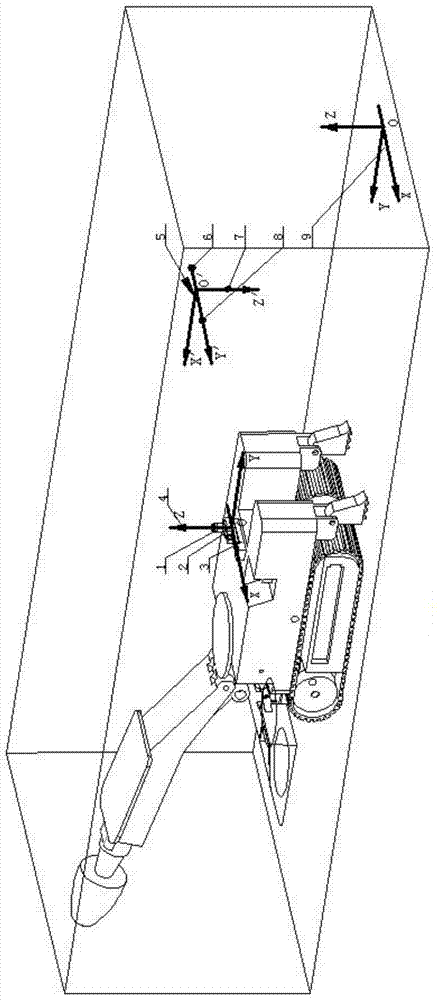
[0025] Such as figure 1 As shown, the method of measuring the pose of a cantilever roadheader using a space point three-dimensional coordinate measurement system based on sector laser angle measurement, the pose measurement process includes the following steps:
[0026] (1) Install the sector laser transmitter on the cantilever roadheader so that it is fixedly connected with the cantilever roadheader. The fan laser receiving end is installed in the formed roadway, that is, 3 non-collinear fan laser receivers.
[0027] (2) A coordinate system is constructed by the sector laser transmitter, which is called the fuselage coordinate system (O-XYZ). The fan laser transmitter is composed of a high-precision slide table, a high-precision turntable, a fan laser transmitter, and an initial reference. The initial position rotation axis of the fan laser transmitter is the Z axis, and the moving direction of the high-precision slide table is the X axis.
[0028] (3) A coordinate system i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More