

Unmanned aerial vehicle autonomous navigation positioning method with assistance of visual information
A positioning method and autonomous navigation technology, applied in satellite radio beacon positioning systems, navigation, surveying and navigation, etc., can solve problems such as inability to provide navigation information, inability to differentiate navigation strategies, damage to UAVs and airborne equipment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0050] The concrete implementation steps of a kind of visual information assisted UAV autonomous navigation positioning method of the present invention are as follows:
[0051] (1) Calibrate and compensate for accelerometers, gyroscopes, magnetic sensors, barometric altimeters and visual sensors;
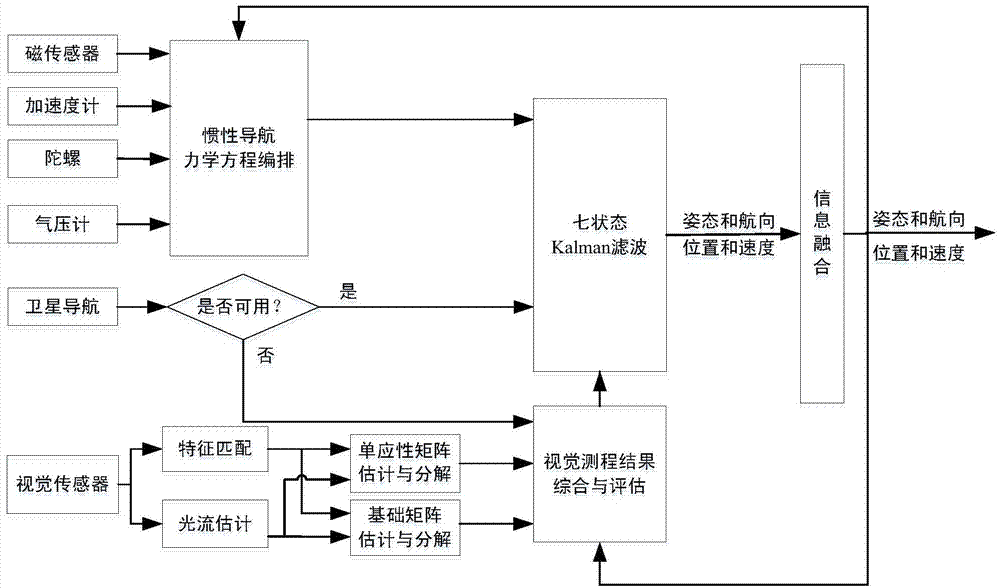
[0052] (2) if figure 1 As shown, according to the layout of the inertial navigation system mechanics equation, the output value of the accelerometer and gyroscope is used to calculate the motion information of the UAV in real time, including position, velocity and attitude;
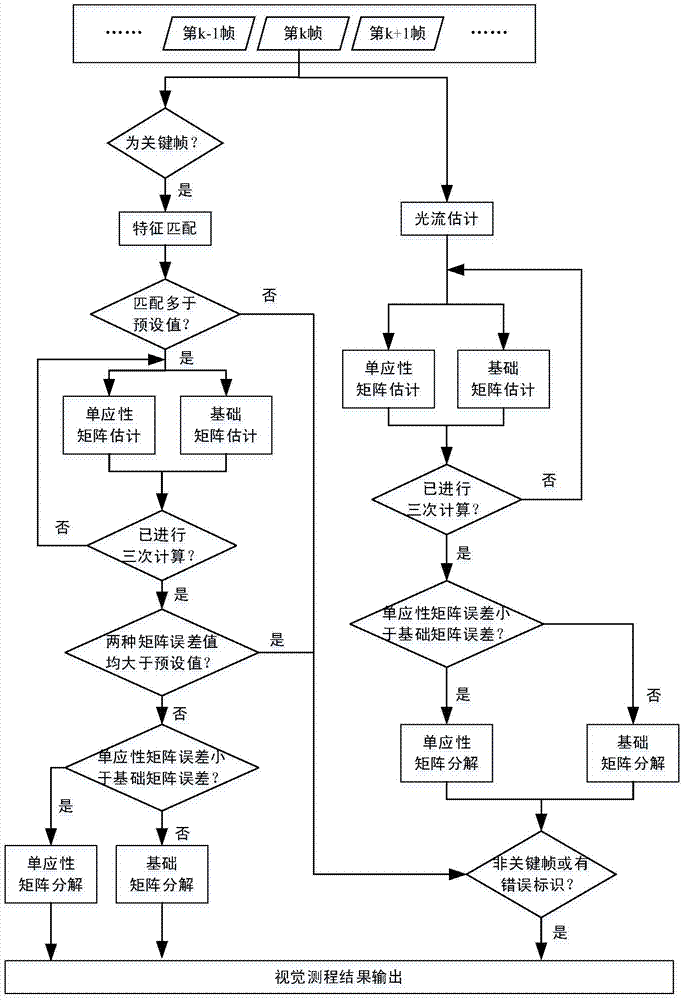
[0053] (3) if figure 2 As shown, the collected images are divided into ordinary frames and key frames, the inter-frame matching of ordinary frames is obtained by optical flow estimation method, and the inter-frame matching of key frames is obtained by feature matching method,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More