

PTAM improvement method based on ground characteristics of intelligent robot
A technology of intelligent robots and robots, applied in the field of robot vision, can solve problems such as inability to build metric maps, camera movement restrictions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] The patent of the present invention will be described in further detail below in conjunction with the accompanying drawings.
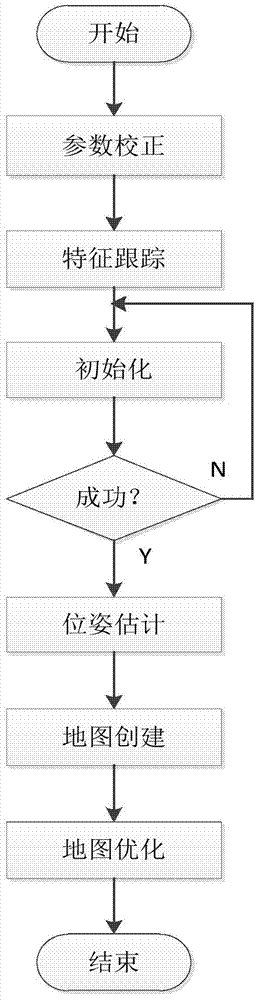
[0094] The flow chart of improved PTAM algorithm based on ground features is attached figure 1 As shown, it specifically includes the following steps:
[0095] Step 1, parameter correction
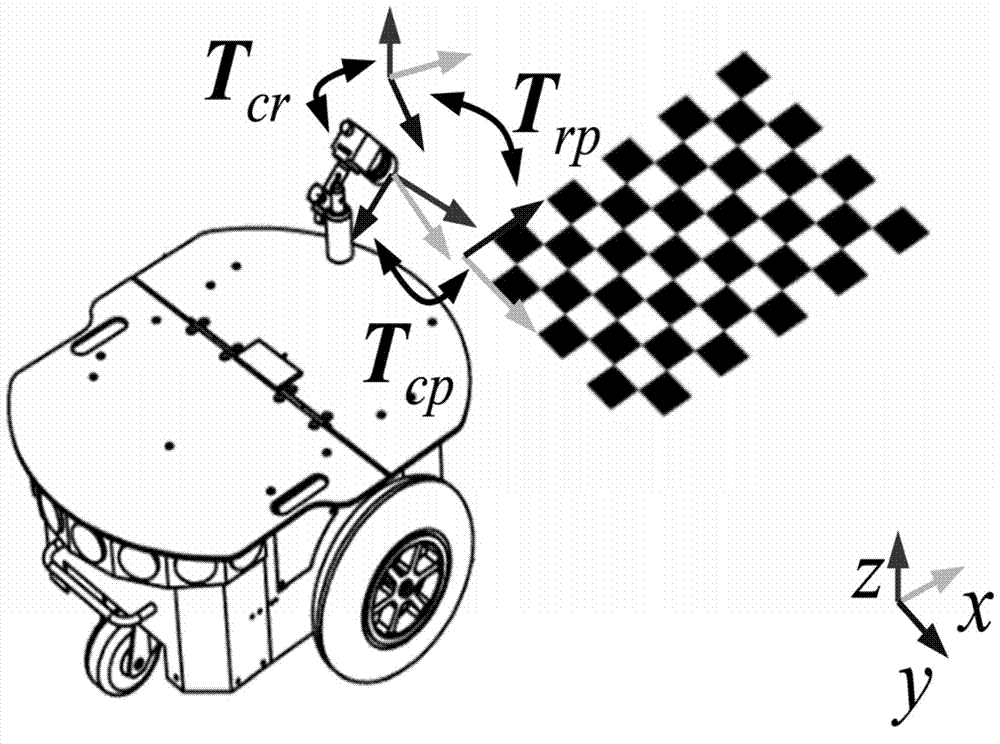
[0096] Step 1.1, parameter definition
[0097] From the relationship between the robot coordinate system and the world coordinate system, the pose representation of the robot is constructed, and the ground plane calibration parameters are determined by the pose relationship between the camera and the target plane.
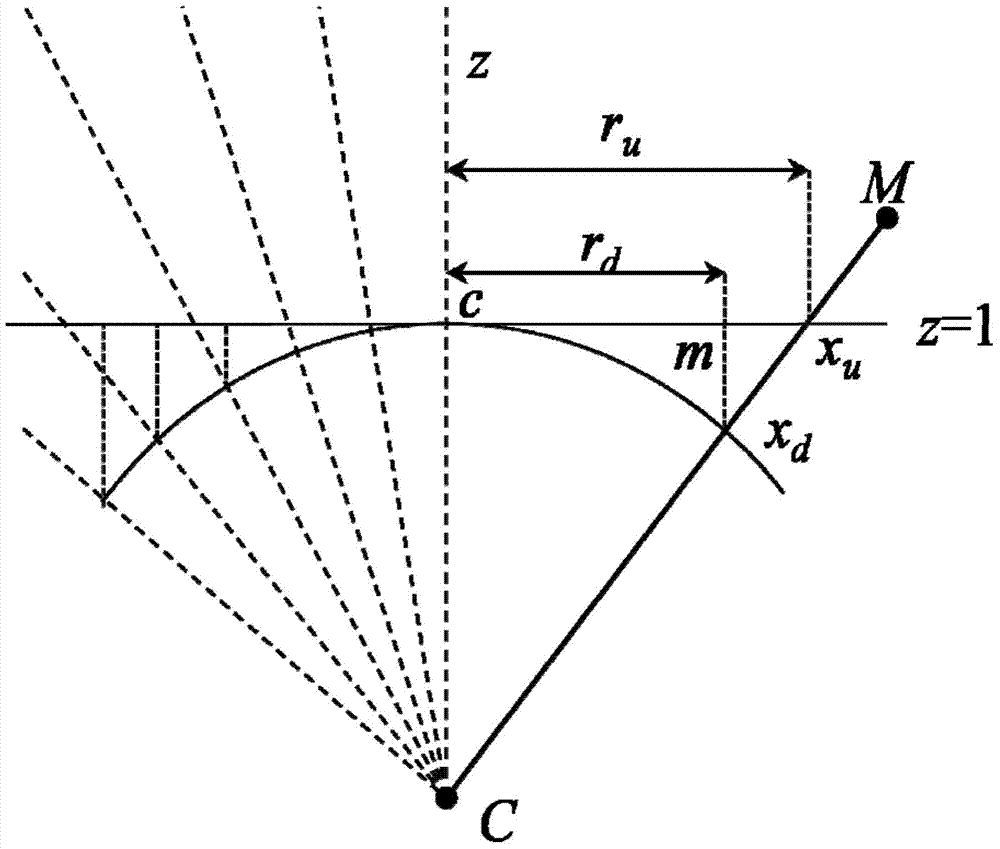
[0098] Step 1.2, camera calibration
[0099] The FOV model is used to realize the correction of the monocular camera, the image pixel coordinates are mapped to the normalized coordinate plane, and the camera internal parameter matrix K is combined to realize the image distortion correction.
[0100] Step 2. Initialization based on ground features
[0101] S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More